

Multi-unmanned aerial vehicle cooperative positioning method based on time delay compensation
A time-delay compensation and collaborative positioning technology, applied in positioning, radio wave measurement systems, instruments, etc., can solve the problems that the accuracy of time delay estimation cannot break through the sampling interval, unfavorable engineering implementation, and restrictions on passive time difference positioning performance, etc., to achieve reduction Small UAV load, precise positioning performance, and the effect of reducing requirements
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and embodiments.
[0034] Symbol representation: symbol (.) in the present invention * means conjugation, Indicates a rounding operation.
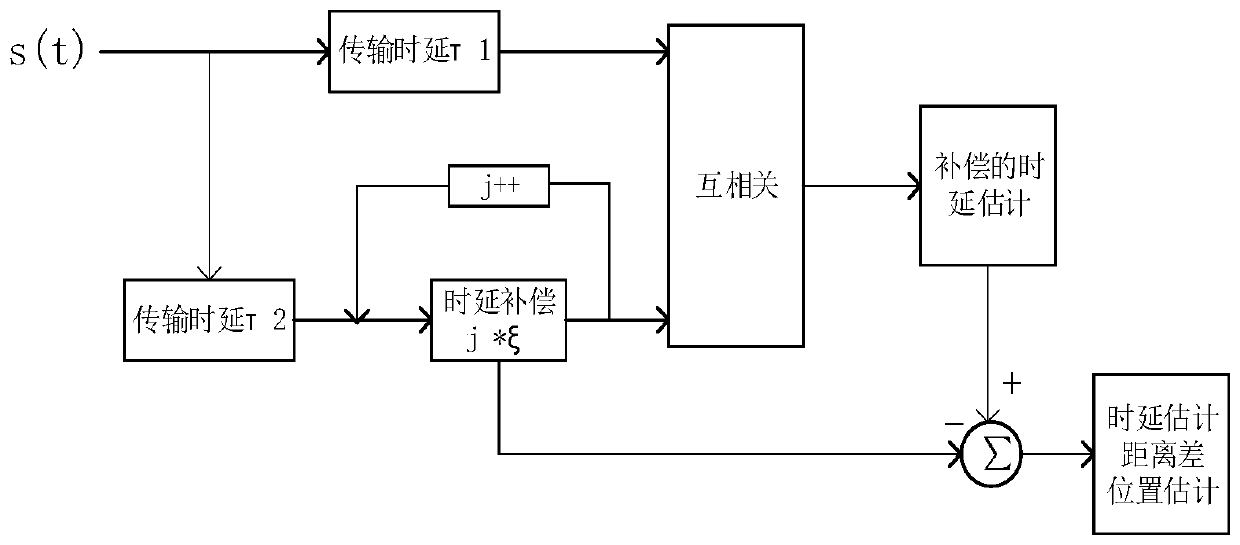
[0035] The multi-UAV cooperative positioning method based on delay compensation described in the present invention, the detailed process is as follows figure 1 shown. This method is used in a distributed passive positioning system composed of multiple UAVs to locate fixed radiation sources. Each UAV transmits the sampled received signal to the control center for centralized processing, and the control center outputs the final positioning result. The UAV synchronously receives the radiation source signal and performs sampling processing; selects the reference signal, performs delay compensation on the remaining signals, and performs cross-correlation processing with the reference signal; based on the opt...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More