Unmanned aerial vehicle real-time obstacle avoidance control method in continuous obstacle environment
A control method and unmanned aerial vehicle technology, applied in the direction of non-electric variable control, control/adjustment system, three-dimensional position/course control, etc., can solve the problems of insufficient ability of real-time sudden continuous obstacles, and reduce overshoot and oscillation , avoid excessive maneuvering, and calculate simple effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] In order to make the objectives, technical solutions and advantages of the present invention clearer, the invention will be further described in detail below with reference to the accompanying drawings.
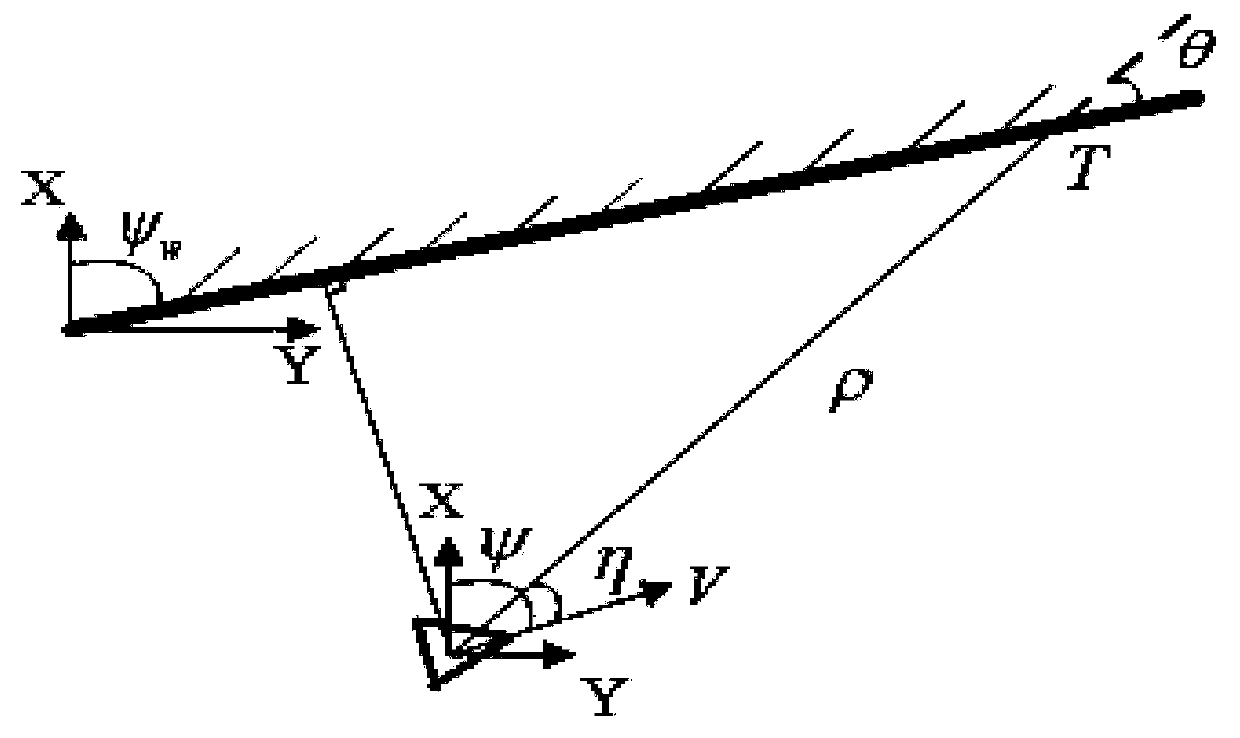
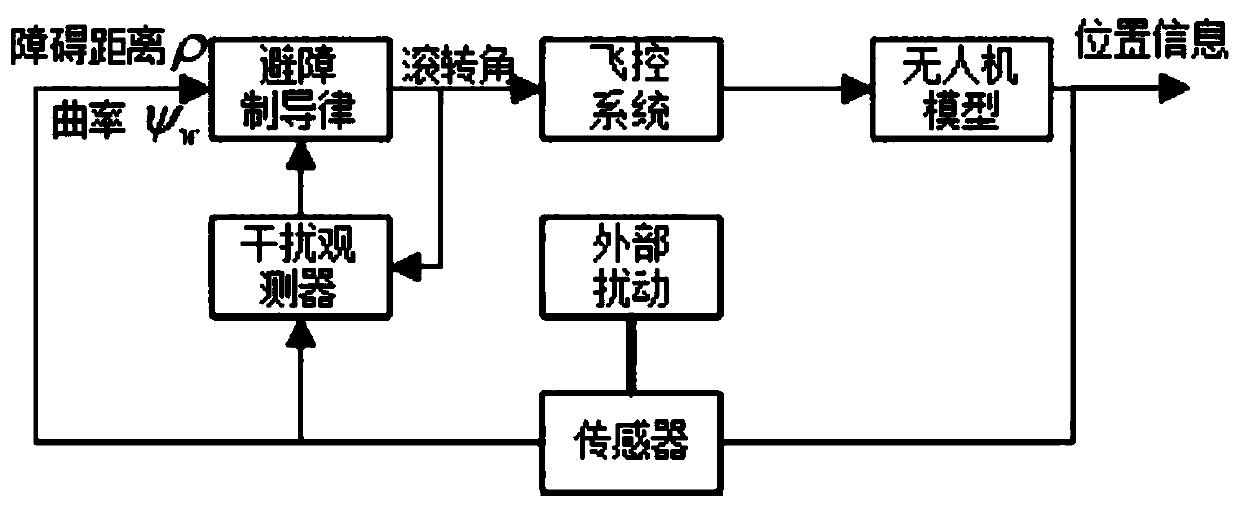
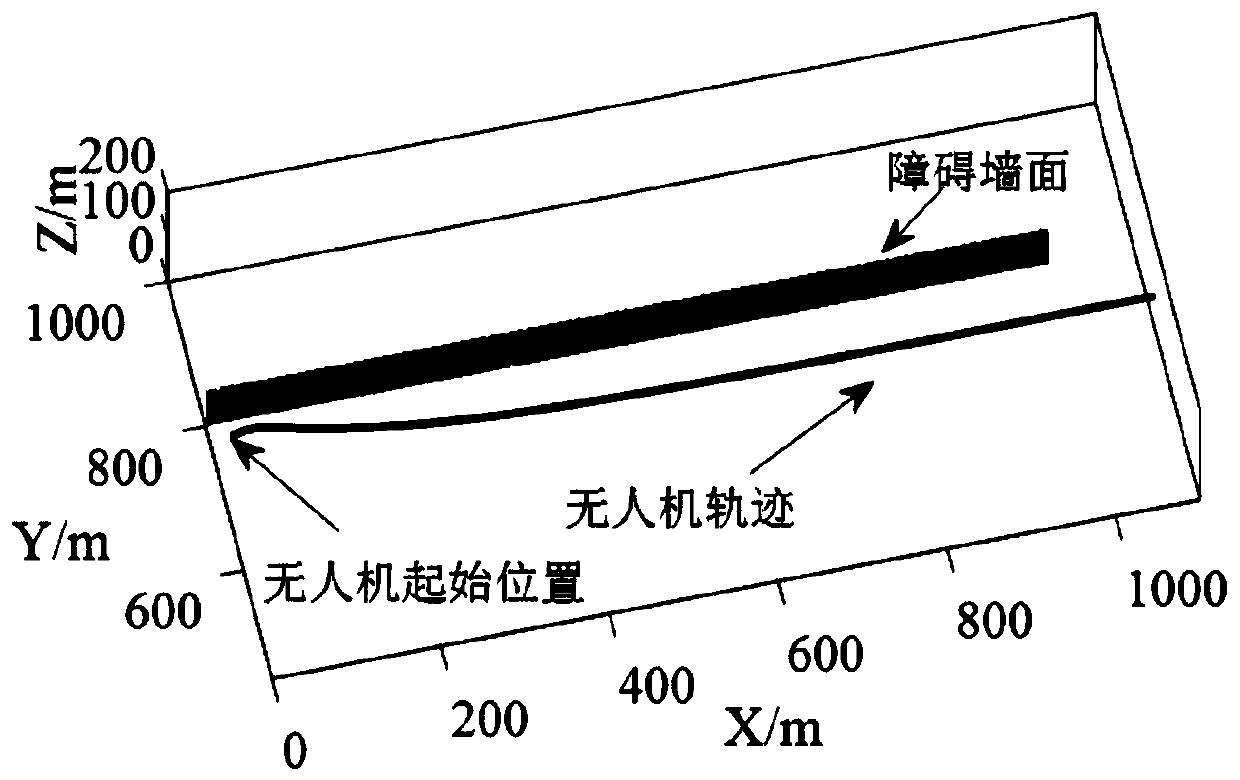
[0029] The urban real-time obstacle avoidance flight control method of the unmanned aerial vehicle of the present invention measures the distance and surface curvature of obstacles on the η azimuth angles on the left and right sides of the x-axis direction of the unmanned aerial vehicle through an on-board sensor, combined with the lateral movement of the fixed-wing unmanned aerial vehicle Learn the equations and the geometric relationship of the space position, and establish the mathematical model of the UAV obstacle avoidance system. Further use the multi-power sliding mode approaching law to design the UAV obstacle avoidance guidance law. Taking the sensor error into consideration, a super spiral sliding mode observer is designed to estimate and compensate the uncertain...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



