

Optimal contact line detection method between robot parallel plate clamp and target object
A target object and detection method technology, applied in the field of intelligent robot vision, can solve problems affecting the detection efficiency of target object contact position
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] Utilize the program written by the present invention to carry out the best contact line detection to the rectangular box
[0045] Utilize the program written by the present invention to carry out optimal contact line detection to tweezers
[0046] Table 1 is the experimental results of using the present invention and utilizing the robot parallel plate fixture to clamp the target object;
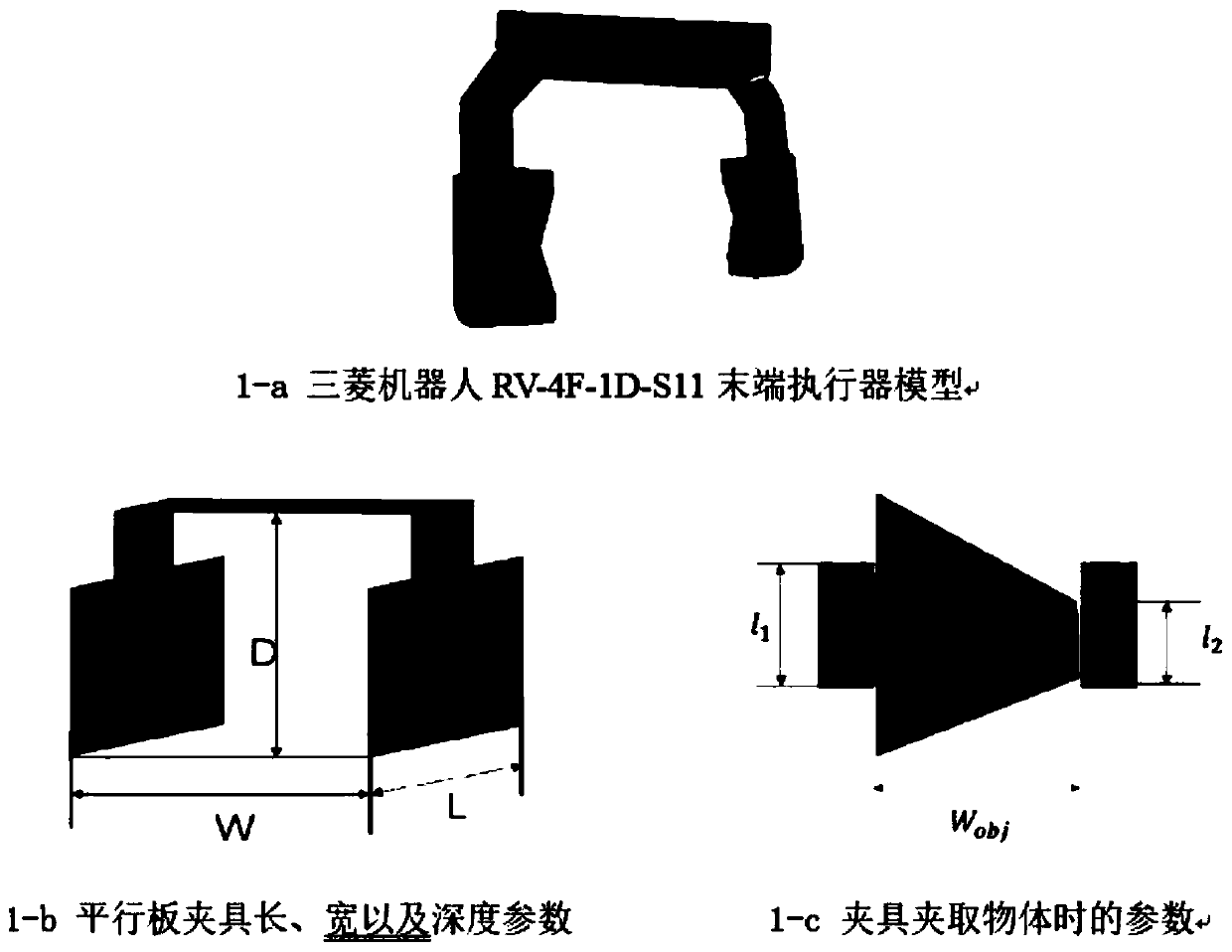
[0047] Among them, L represents the width of the grip, D represents the internal depth of the grip, and W represents the opening size of the grip. at the same time l 1 , l 2 respectively represent the lengths of the two contact lines of the two plate fixtures, n 1 , n 2 dB represents the normal vector at the two contact lines, W obj Indicates the width of the grasped target object along the grasping direction.
[0048] Table 1
[0049] target object Success rate Average time rectangular box 25 / 25 3.016s tweezers 25 / 25 3.125s adhesive tape 23 / 25 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More