Modular combined motion platform used for stability training and amplitude limiting random motion planning and control method
A motion platform, modular technology, applied in the control of using feedback, motion accessories, gymnastics equipment, etc., can solve the problems of slow speed, no convenient deformation, and high level of parallel platform table.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
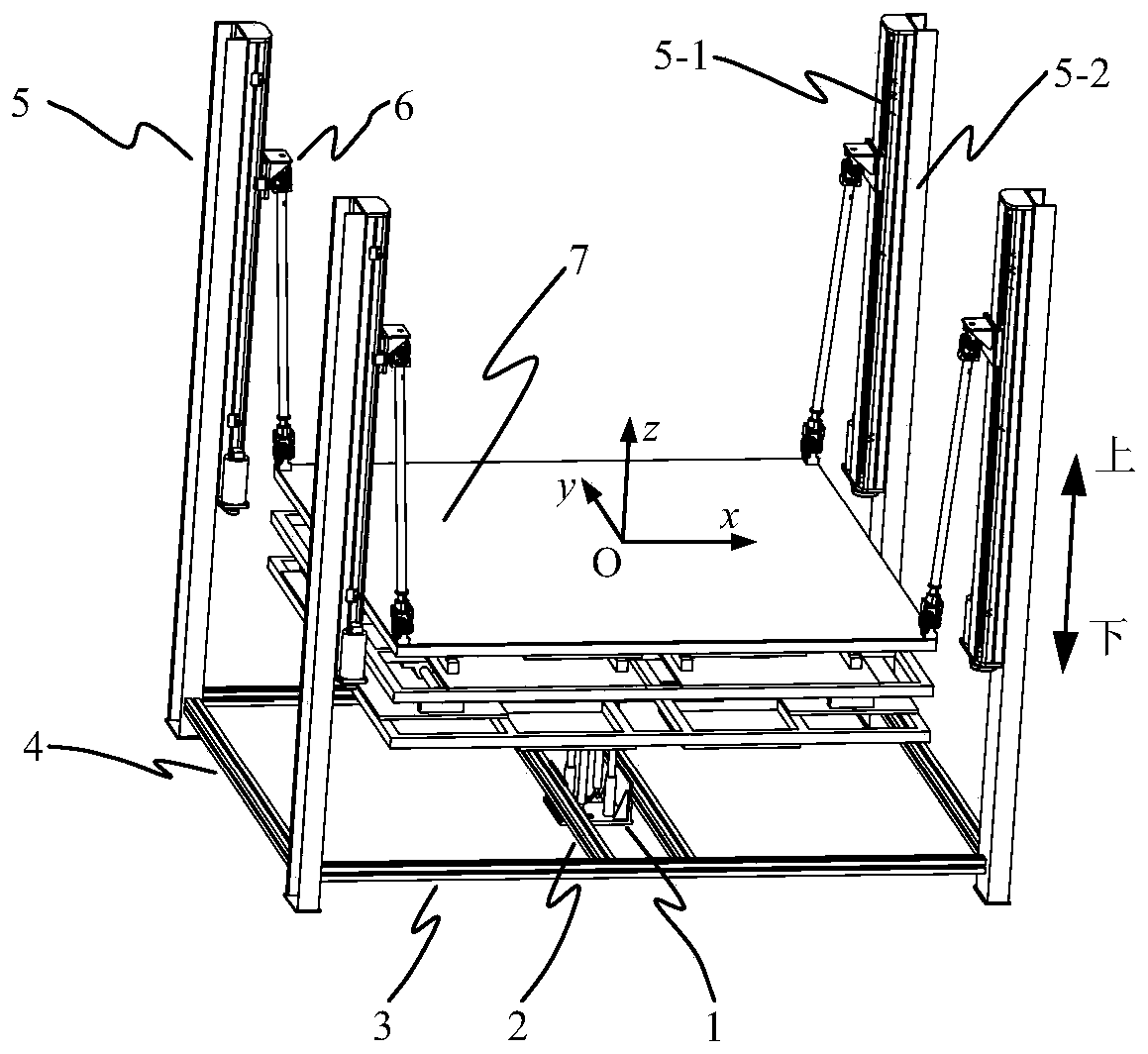
[0068] Specific implementation mode one: as figure 1 As shown, the six-degree-of-freedom series-parallel mechanism motion platform of the present invention is composed of a central support module 1, a y-direction connecting rod 2, an x-direction connecting rod 3, a column connecting rod 4, a column module 5, and a spherical hinge The connecting rod module 6 and the two-degree-of-freedom moving platform module 7 are composed. Among them, there are two y-direction connecting rods, two x-direction connecting rods 3, and two column connecting rods 4, and the y-direction connecting rods 2 are arranged along the y-axis direction of the coordinate system ΣO-xyz, connecting the central support module 1 and the x-direction connecting rod 3 The x-direction connecting rod 3 is arranged along the x-axis direction of the coordinate system ΣO-xyz, connecting the y-direction connecting rod 2 and the two column modules in the x-axis direction; the column connecting rod 4 connects the two colu...
specific Embodiment approach 2
[0078] Specific implementation mode two: as Figure 7 As shown, when performing stability training on the footed / legged robot, in order to increase the friction coefficient between the sole of the robot and the moving platform surface and provide a certain buffer, the pre-processed surface on the table (7-2-2) can be used A rubber plate with certain elasticity is installed on the mechanical connection interface. For stability training tasks that need to consider irregular ground fluctuations, such as Figure 7 Shown in (a), various irregular bumps are installed on the table top (7-2-2). For enhanced training or stability test tasks in a specific environment, corresponding special scenes can be installed on the table. For example, for the stability test task of going up and down stairs, the Figure 7 Step pads of different sizes in (b) are installed on the moving platform to simulate the structure of the actual stairs; for stability training or testing under discontinuous ter...
specific Embodiment approach 3
[0079] Specific implementation mode three: as Figure 8 As shown, using the above-mentioned central support module 1, column module 5, spherical joint connecting rod module 6, two-degree-of-freedom moving platform module 7, single-degree-of-freedom moving platform module 8, and tabletop module 9 without degree of freedom, the modules designed in the present invention The combined series-parallel mechanism motion platform can be composed of 6 different mechanism configurations with two, three, four, five, and six degrees of freedom (including two types of four-degree-of-freedom configurations).
[0080] Figure 8 The two-degree-of-freedom motion platform in (a) is composed of a central support module 1, two column modules 5, two ball-joint link modules 6 and a non-degree-of-freedom table module 9, and has the ability to swing around the x-axis and around the y-axis Two degrees of freedom of motion.
[0081] Figure 8 The three-degree-of-freedom motion platform in (b) is comp...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap