

A three-axis, seven-variable, full-degree-of-freedom positioning and tracking method for cameras in space
A camera, three-axis technology, applied to the camera in the field of three-axis, seven-variable, full-degree-of-freedom positioning and tracking in space, can solve the problems of difficult to eliminate pitch commutation hysteresis, imaging interference, lack of rotational degrees of freedom, etc. It is easy to promote and use, has good initialization effect, and has complete functions.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
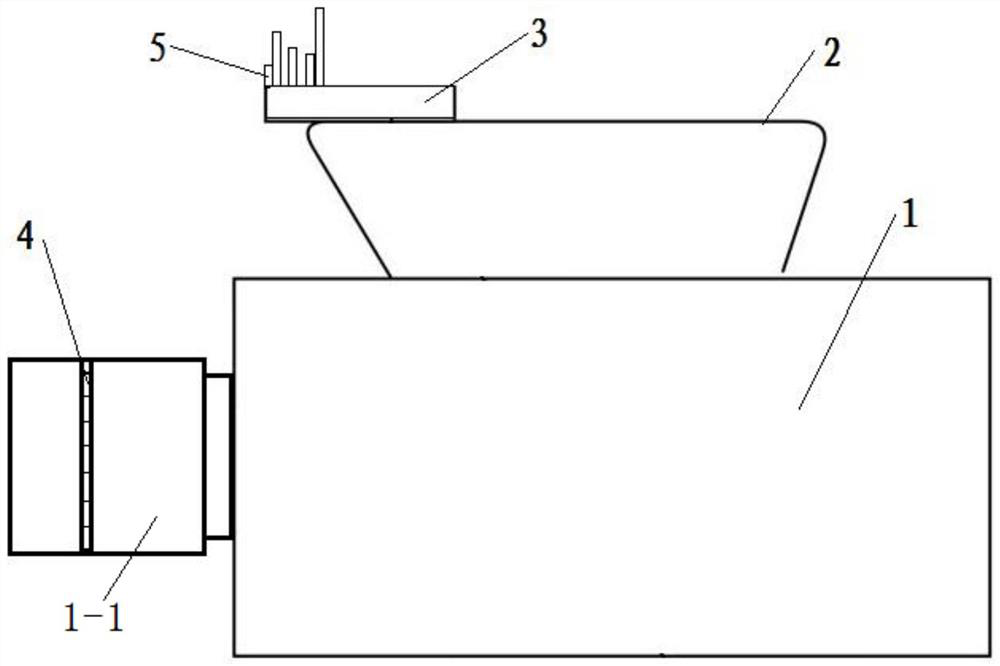
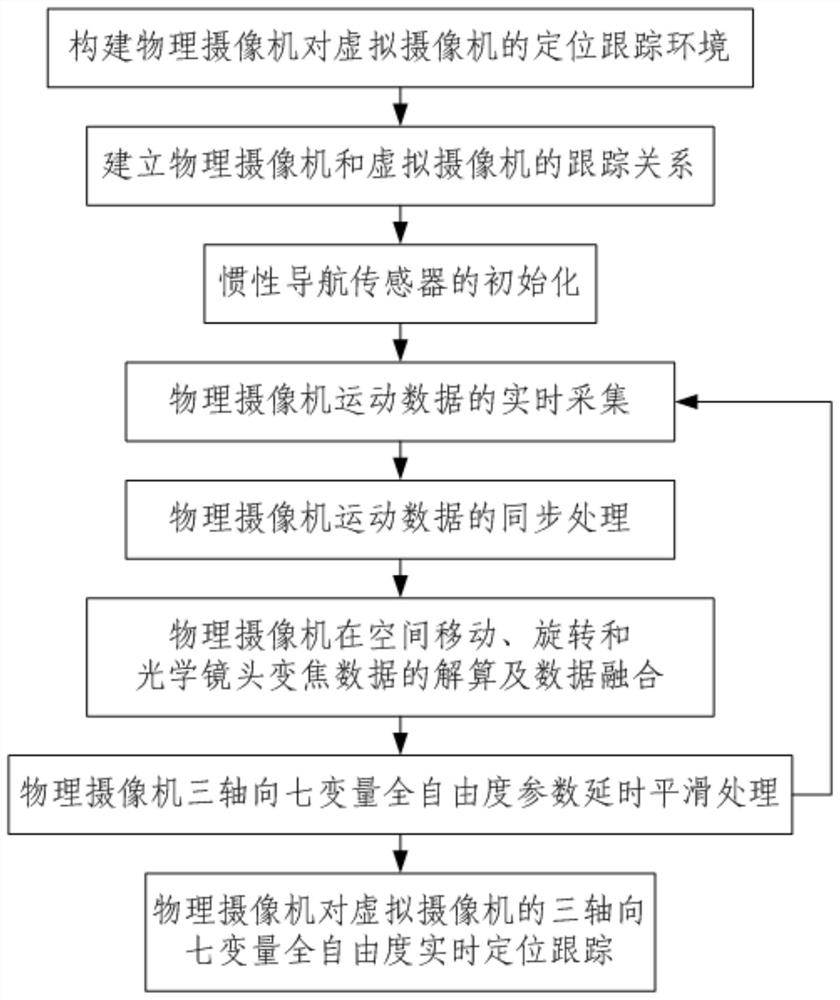
[0034] Such as figure 1 with figure 2 As shown, the camera of the present invention has a three-axis seven-variable full-degree-of-freedom positioning and tracking method in space, comprising the following steps:
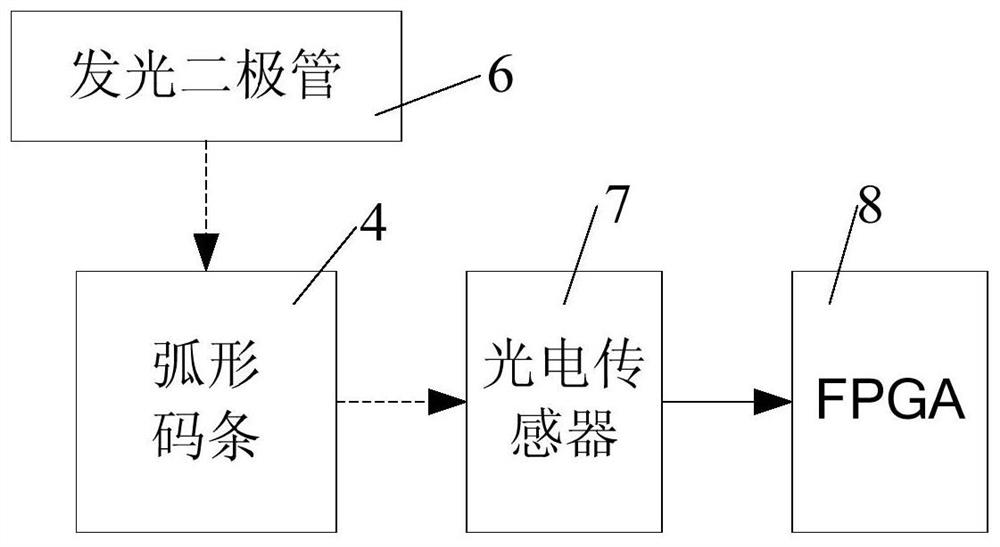
[0035] Step 1. Construct the positioning and tracking environment of the physical camera to the virtual camera: install a light source with a specified wavelength in the space, install a data processing box 3 on the physical camera 1, and the data processing box 3 includes a housing and a circuit fixed in the housing board, on which a plurality of optical sensors 5 with different heights are installed, for receiving the optical signal of the light source of the specified wavelength; the circuit board is integrated with a microprocessor and The connected inertial navigation sensor is installed on the lens 1-1 of the physical camera 1 for obtaining the zoom ring rotation angle data acquisition mechanism of the zoom ring rotation angle;
[0036] In this embodiment, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More