

Rehabilitation robot control method based on electromyographic signal
A rehabilitation robot and myoelectric signal technology, applied in muscle training equipment, gymnastics equipment, sports accessories, etc., can solve the problems of humanoid and unconsidered, and achieve the effect of smooth movement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0023] In this example, the control method used is
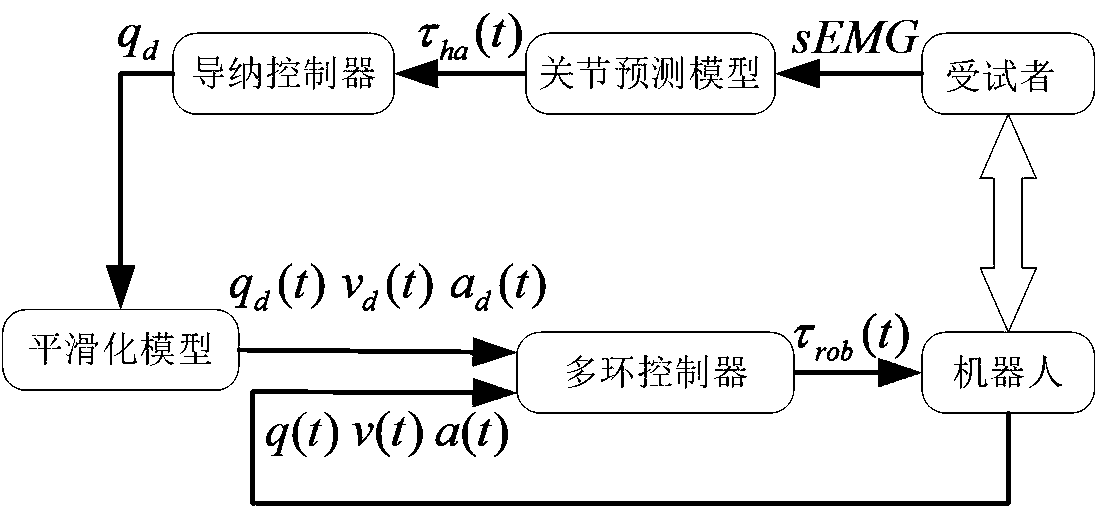
[0024] S1: Obtain the sEMG signals of the active muscles and antagonist muscles (tibialis anterior and gastrocnemius) of the user's ankle joint movement, and input the sEMG signals into the linear proportional model τ ha =τ MA · nEMG A -τ MP · nEMG P After obtaining the user's joint torque τ ha . τ MA and τ MP are the peak torques of the agonist and antagonist muscles during maximal voluntary contraction, nEMG A and nEMG P They are the normalized signals of the peak value of the EMG signal by using the agonist muscle and the antagonist muscle during the maximum voluntary contraction, respectively. Among them, the tibialis anterior muscle is the active muscle when the ankle is dorsiflexed; the gastrocnemius is the antagonist muscle, and the gastrocnemius is the active muscle when the ankle is plantar flexed, and the tibialis anterior is the antagonist muscle;
[0025] S2: Set the joint torque τ ha Input admittance ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More