

Cross-type coaxial tilting rotor amphibious drone
A tilt-rotor, cross-shaped technology, applied in the direction of rotorcraft, unmanned aircraft, motor vehicles, etc., can solve the problems of difficult to complete underwater operations, slow response speed, instability, etc., to achieve flexible adjustment, Reduce forward resistance and ensure the effect of underwater work
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
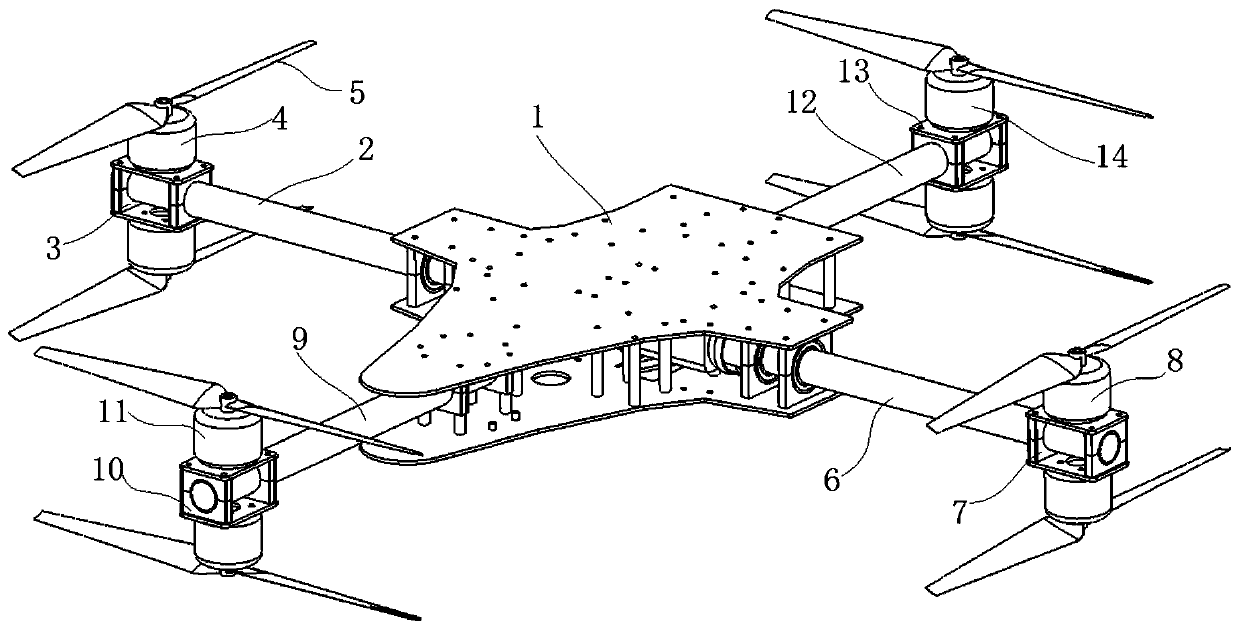
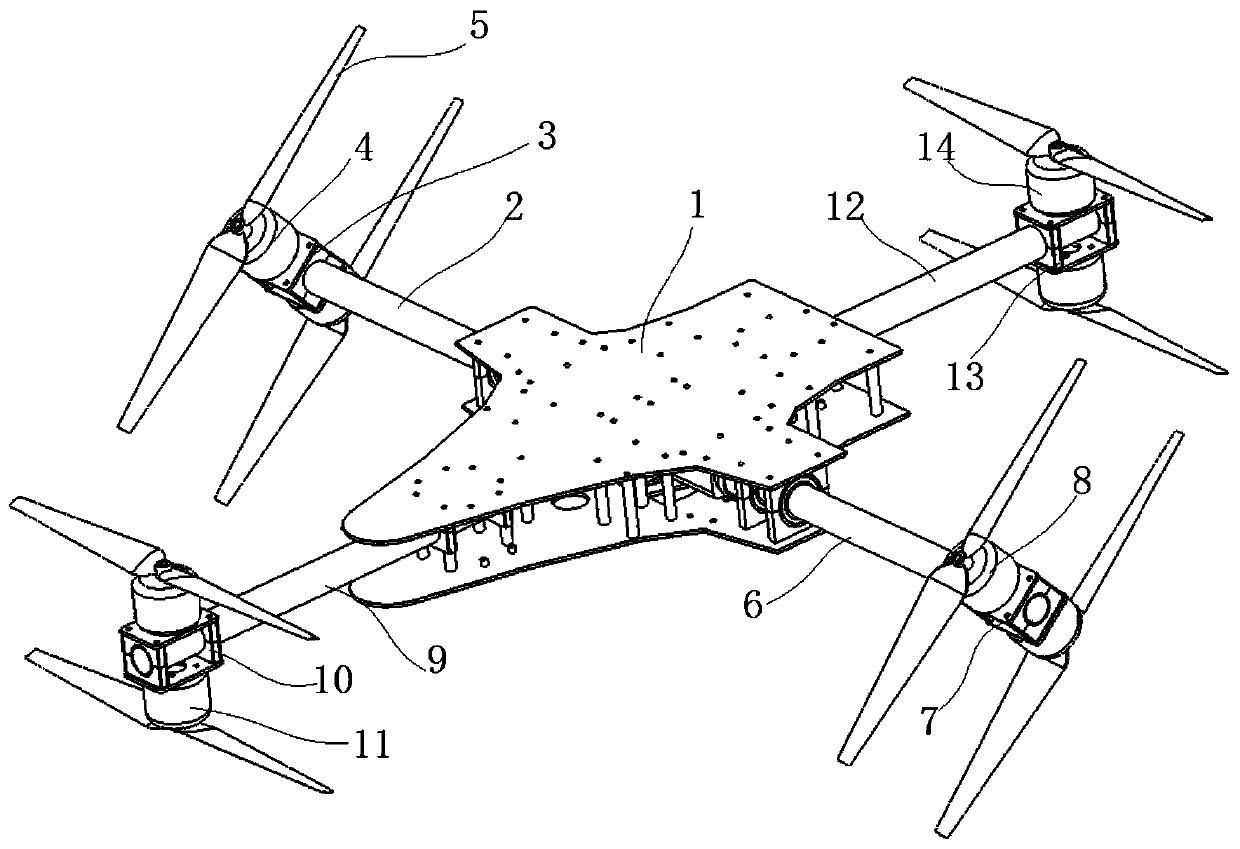
[0033] A cross-shaped coaxial tilt-rotor amphibious UAV, such as figure 1 and Figure 4 As shown, it includes a body 1, a tilting coaxial multi-rotor mechanism located on the body 1, and a waterproof sealed cabin 15. A power supply module and a flight control module are installed in the waterproof sealed cabin 15, and the flight control module is connected to the The tilting coaxial multi-rotor mechanism and the power module are electrically connected.
[0034] Wherein, the tilting coaxial multi-rotor mechanism is a tilting coaxial eight-rotor mechanism composed of a fixed rotor structure and a tilting rotor structure.
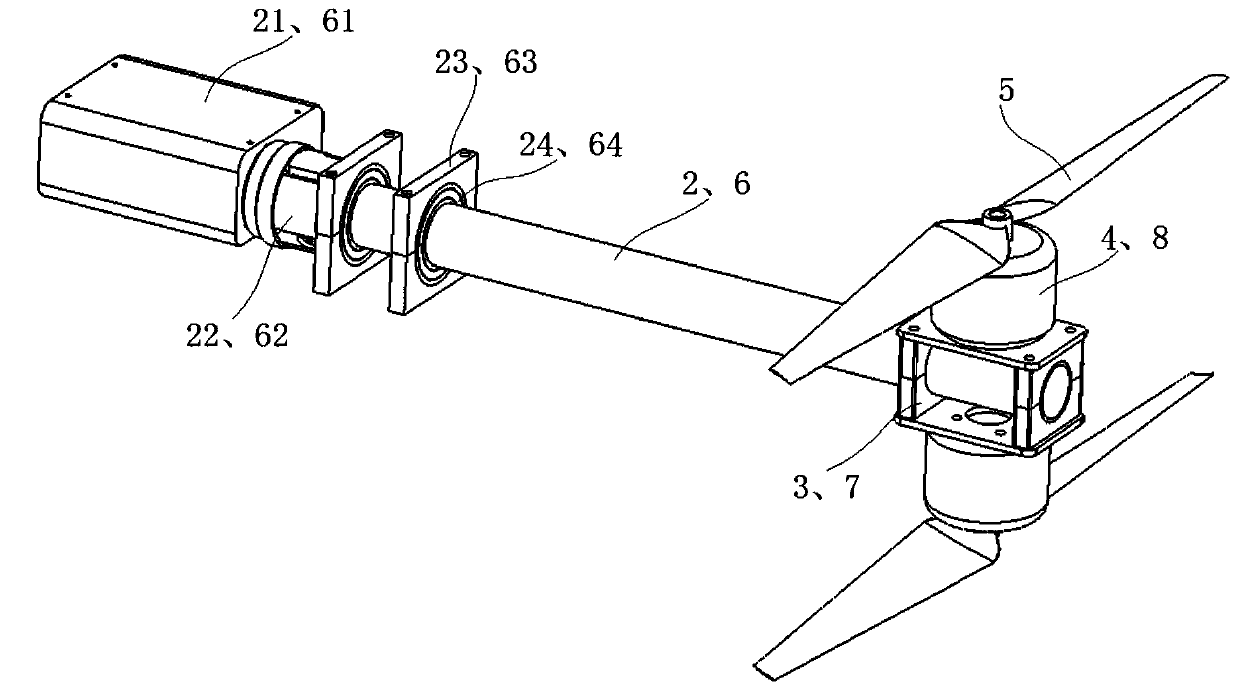
[0035] Wherein, the tilt rotor structure includes a first tilt rotor substructure and a second tilt rotor substructure which are arranged symmetrically;
[0036] Such as figure 2As shown, the first tilting rotor substructure includes a first waterproof steering gear 21, a first pipe connector 22, a first pipe clamp 23, a first bearing 24, a first machine a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More