

A contact state recognition method for robot assembly based on gwa-svm
A contact state and identification method technology, applied in machine learning and robot control, using the contact state identification field of industrial robot assembly parts, can solve the problem of low classification accuracy of industrial robot parts assembly force data, and achieve good convergence accuracy and fast convergence. Accurate classification of speed and contact state
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The present invention will be further described below in conjunction with the accompanying drawings.
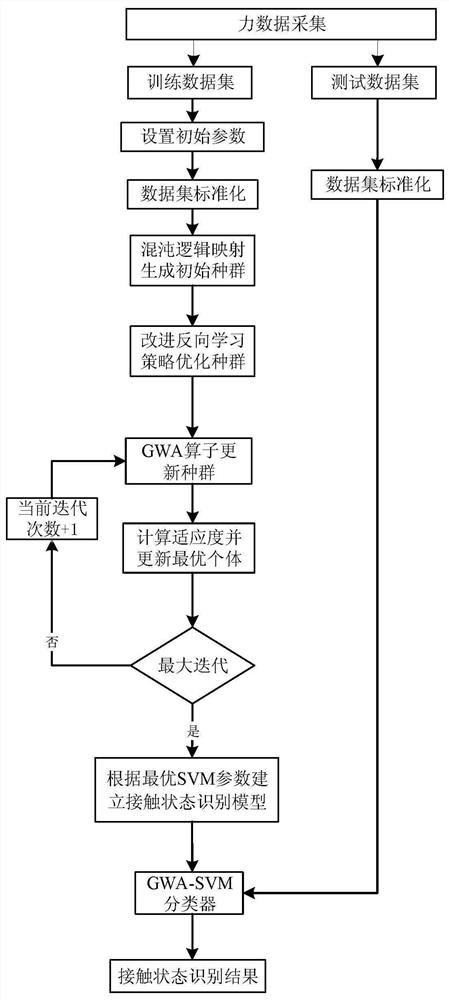
[0040] refer to Figure 1 ~ Figure 3 , a contact state recognition method for robot assembly based on GWA-SVM, comprising the following steps:
[0041] Step 1: Use the Mitsubishi industrial robot RV-2F to assemble the parts, collect multiple sets of force data during the assembly process through the six-dimensional force sensor 4F-FS001-W200, and establish a training data set {X1 , L 1} with the test dataset {X 2 , L 2}. where X 1 ,X 2 is the six-dimensional force data X=(f x ,f y ,f z ,m x ,m y ,m z ), f x ,f y ,f z Respectively force data along the x, y, z axis directions, m x ,m y ,m z are the torque data around the x, y, and z axes, respectively. L 1 , L 2 for respectively with X 1 ,X 2 The corresponding contact state, that is, the category to which the data belongs, the training data X 1 It is divided into 6 categories.
[0042] Step 2: Set...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More