Blind guide robot, blind guide system and blind guide method
A blind-guiding robot and blind-guiding system technology, applied in the directions of instruments, navigation, manipulators, etc., can solve the problem of reducing the calculation speed and accuracy, calibrating the blind-guiding equipment, difficult to seek help from others, detecting the range of obstacles, and large orientation limitations, etc. It can reduce the calculation speed and accuracy, improve the safe travel experience, and achieve the effect of simple and efficient mechanical structure.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment 1
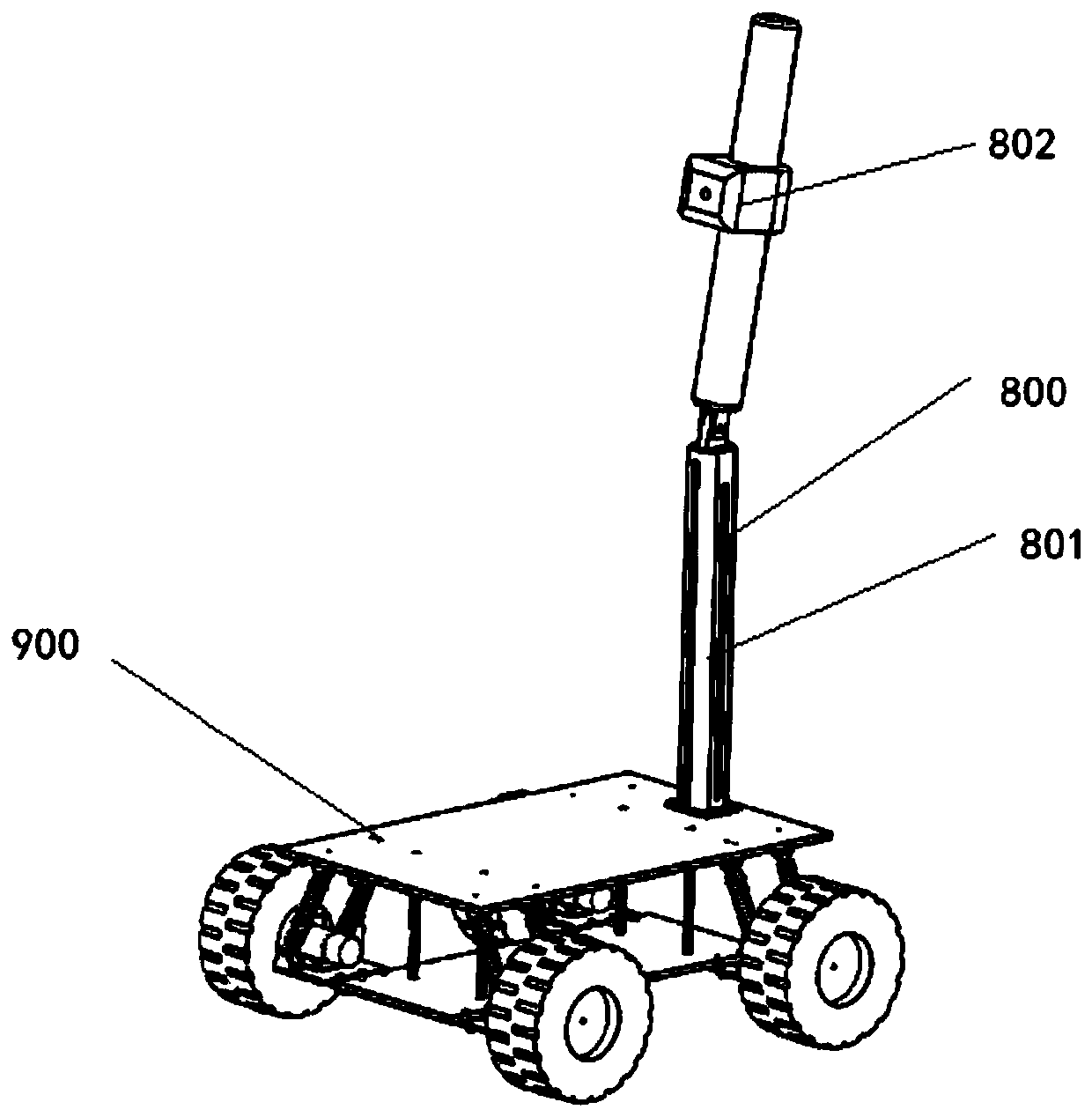
[0082] Such as figure 1 As shown, this embodiment discloses a blind-guiding robot, which includes a moving part 900 and a traction part 800; the traction part includes a retractable and foldable traction handle 801, one end of the handle is fixed to the moving part, and the blind person holds the traction part The handle can move with the blind-guiding robot; the camera frame 802 is installed on the traction handle, and the camera is installed to obtain the visual field image of the blind person walking.
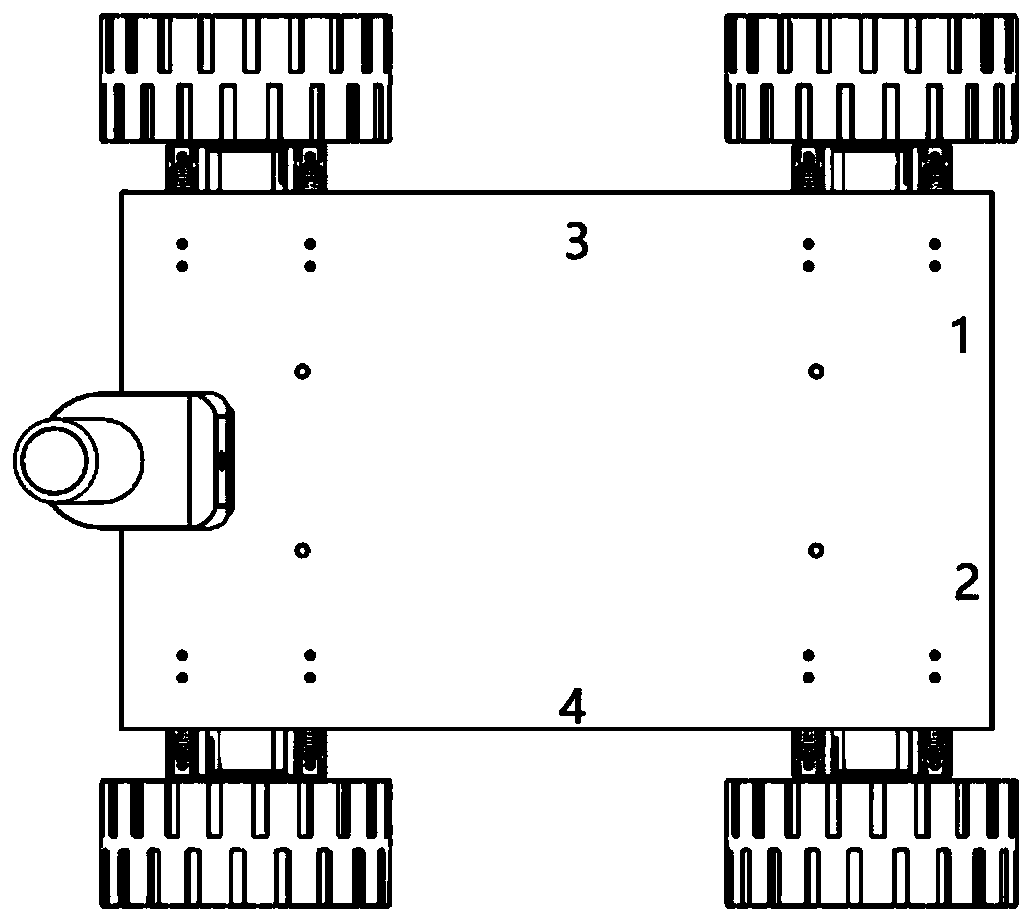
[0083] The mobile part of the blind guiding robot is equipped with a control module, four sets of ultrasonic obstacle avoidance modules connected with the control module, and an infrared obstacle avoidance module. The ultrasonic obstacle avoidance module includes a steering gear and an ultrasonic scanner, which are installed in pairs on the mobile Part of the front, both sides, such as figure 2 As shown, when the blind-guiding robot is moving forward, it scans the obstacle...
Embodiment 2
[0091] A blind-guiding system, comprising an alarm module and the blind-guiding robot in Embodiment 1; the alarm module specifically includes a trigger unit, a storage unit, an acquisition unit, and an execution unit, and the trigger unit is a button provided on a traction handle; the storage The unit stores a number; the obtaining unit is used to obtain the system location; the execution unit receives the trigger unit information and generates a short message with location and sends it to the stored number. Family members' numbers or alarm calls can be stored as needed.
[0092] The blind guiding system also includes a bluetooth communication module and APP;
[0093] The bluetooth communication module is connected with the control module, the APP is installed on the smart phone and obtains the geographic code of the mobile phone map software and the voice recognition information of the mobile phone, and after the voice recognition matches the geographic code, the navigation i...
Embodiment 3
[0117] A method for guiding the blind, comprising the steps of:
[0118] 1. Blind guide based on blind road recognition
[0119] S1.1. Obtain the road image ahead of the blind person in the walking direction;
[0120] S1.2. Convert the RGB color model of the image to the HSV color model. The HSV color space is more inclined to the intuitive effect of human vision. Using HSV is easier to separate the distinguishable features of the human eye. The parameters of the colors in the model are: Hue (H), Saturation (S), Brightness (V);
[0121] HSV color model principle:
[0122] The HSV color space is more inclined to the intuitive effect of human vision, and it is easier to separate the distinguishable features of the human eye by using HSV. First convert the recognition image to HSV, the formula is as follows:
[0123]
[0124] if H<0 then H=H+360
[0125] We hope to use the perspective of human visual effects to distinguish blind roads and traffic lights, so we hope to con...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com