

Double-arm robot performance measuring method based on multiple laser trackers
A technology of laser tracker and measurement method, which is applied to manipulators, manufacturing tools, etc., can solve the problems of long time consumption, substandard measurement accuracy, and inability to achieve simultaneous measurement of two arms, and achieves the effect of simple test process and high measurement accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
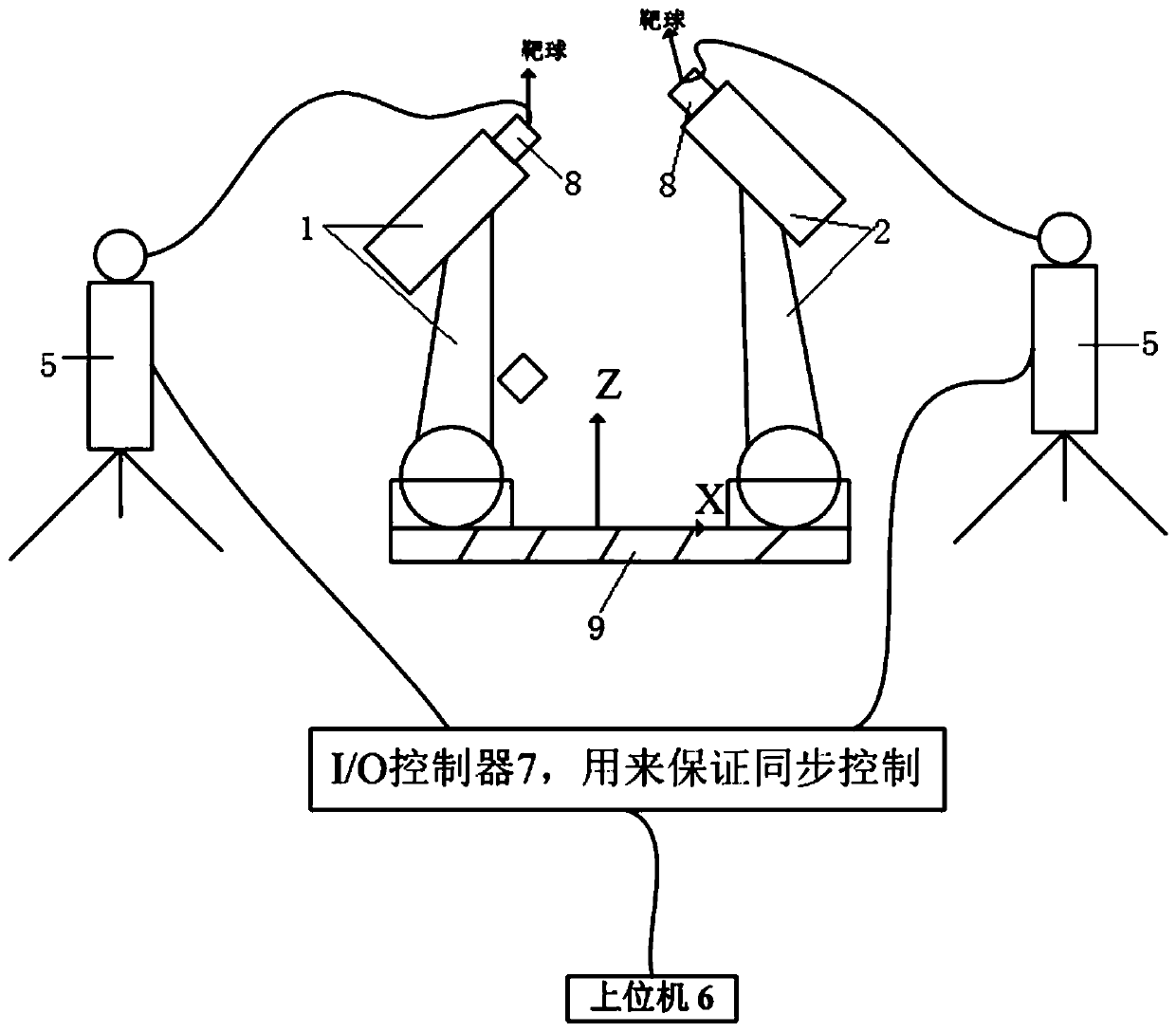
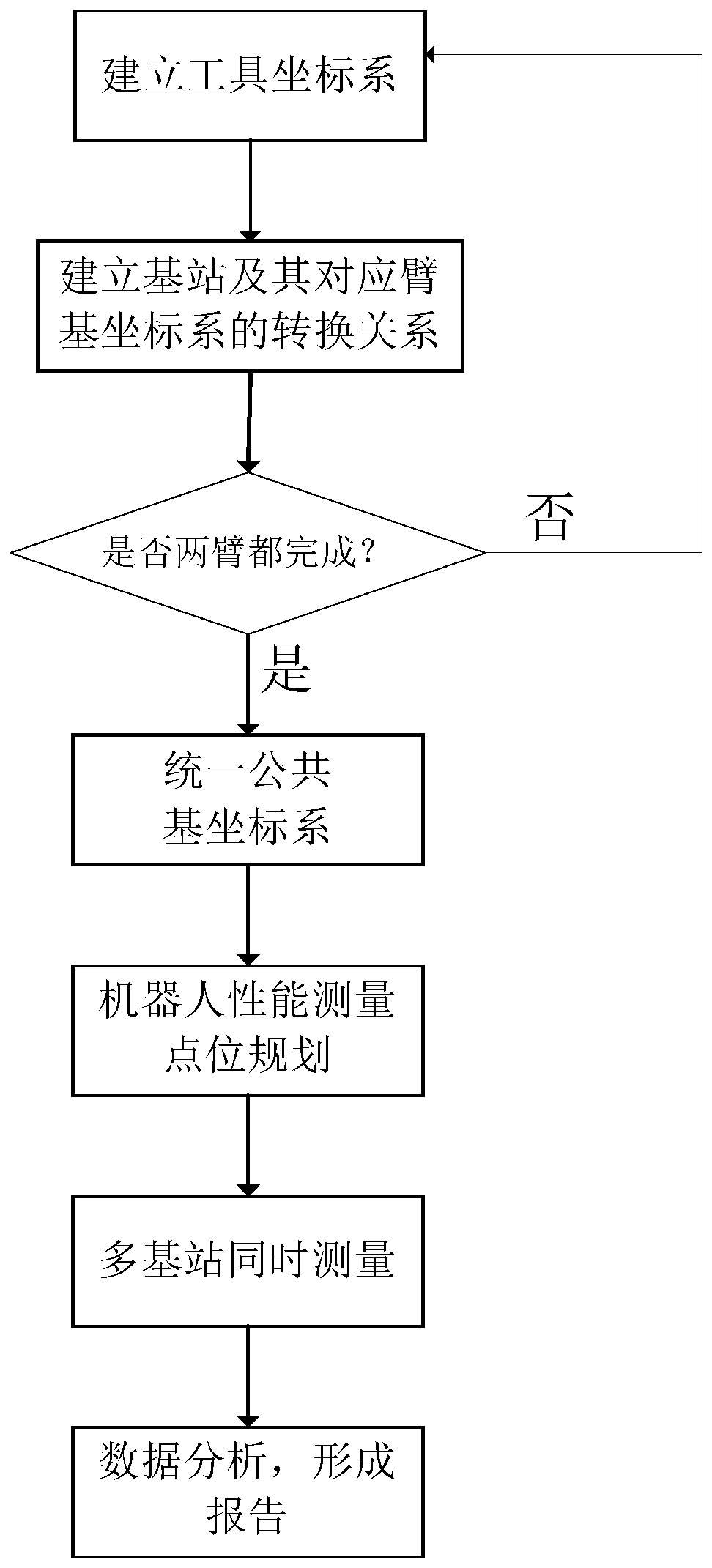
[0047] Such as figure 1 , figure 2 , Figure 4 The illustrated embodiment is a method for measuring the performance of a dual-arm robot based on a multi-laser tracker, comprising the following steps:
[0048] (1-1) Establish a dual-arm robot tool coordinate system;
[0049] The dual-arm robot includes a first mechanical arm 1, a second mechanical arm 2, and a processor 3 installed on a base 9. Both the first mechanical arm and the second mechanical arm include 6 joints, and the 6 joints are arranged sequentially from bottom to top as Joints 1 to 6 also include a teaching pendant 4, two laser trackers 5, a host computer 6 and a controller 7; the processor is electrically connected to the teaching pendant, the first mechanical arm and the second mechanical arm respectively, The controller is electrically connected to the teaching pendant, th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More