

Magnetic robot
A robot and magnetic technology, applied in the field of robotics, can solve the problems of easy instability, falling, and the inability of magnetic climbing robots to adapt to variable-diameter crawling, so as to avoid instability, facilitate variable-diameter crawling, and improve stability. sexual effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The technical solutions of the present invention will be clearly and completely described below in conjunction with the accompanying drawings. Apparently, the described embodiments are some of the embodiments of the present invention, but not all of them. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
[0036] In addition, the technical features involved in the different embodiments of the present invention described below may be combined with each other as long as there is no conflict with each other.
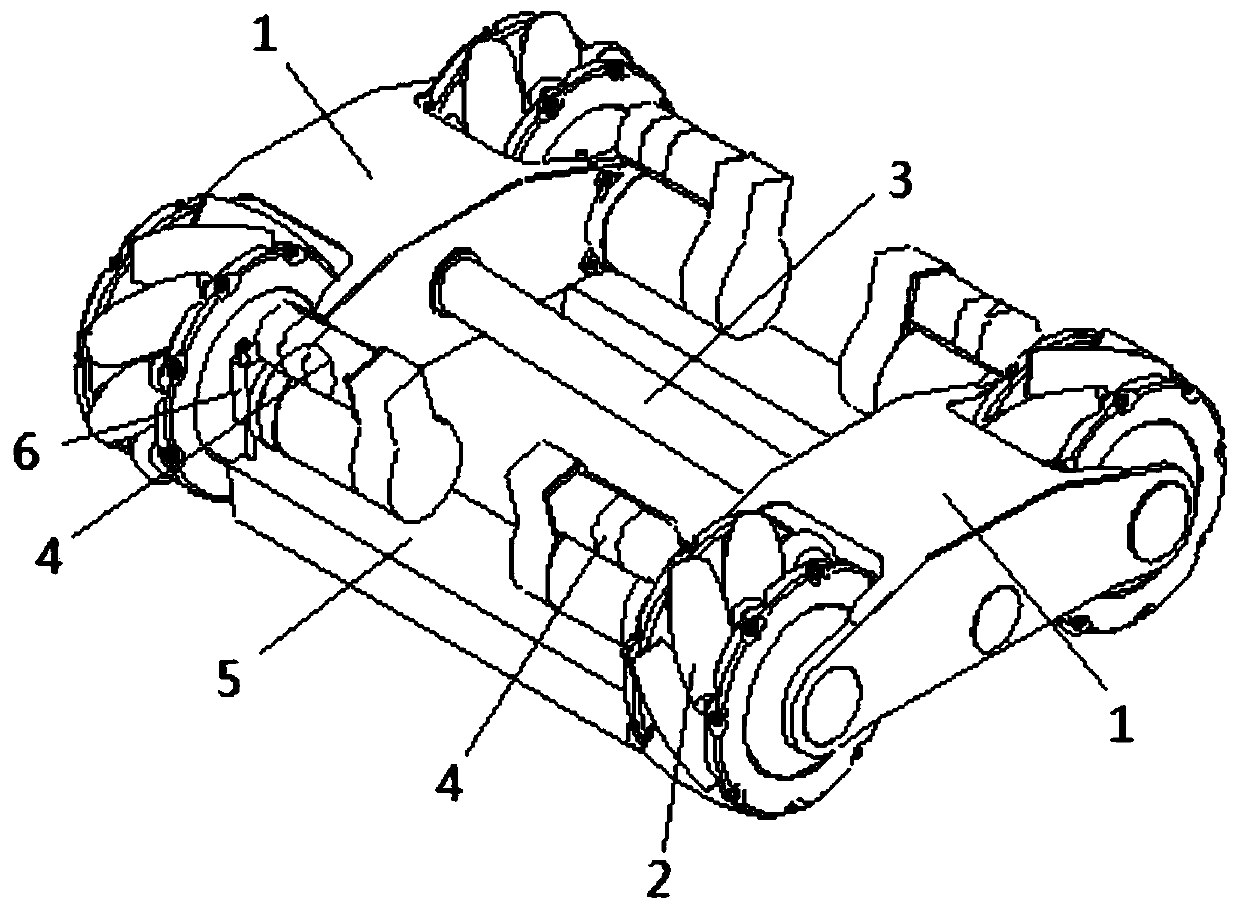
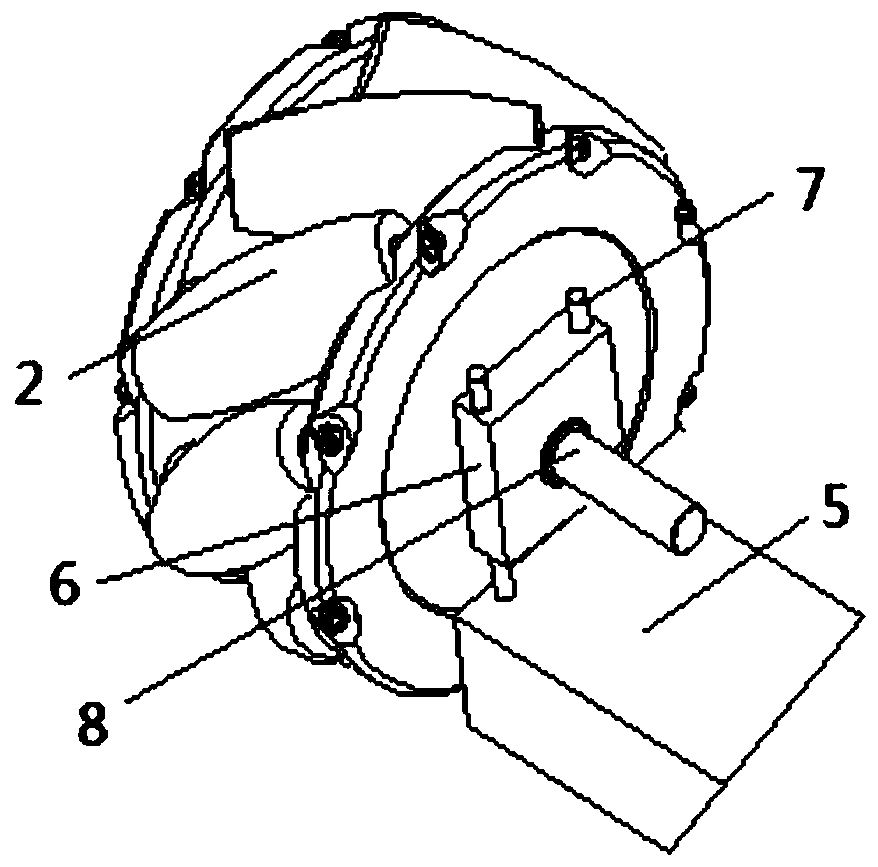
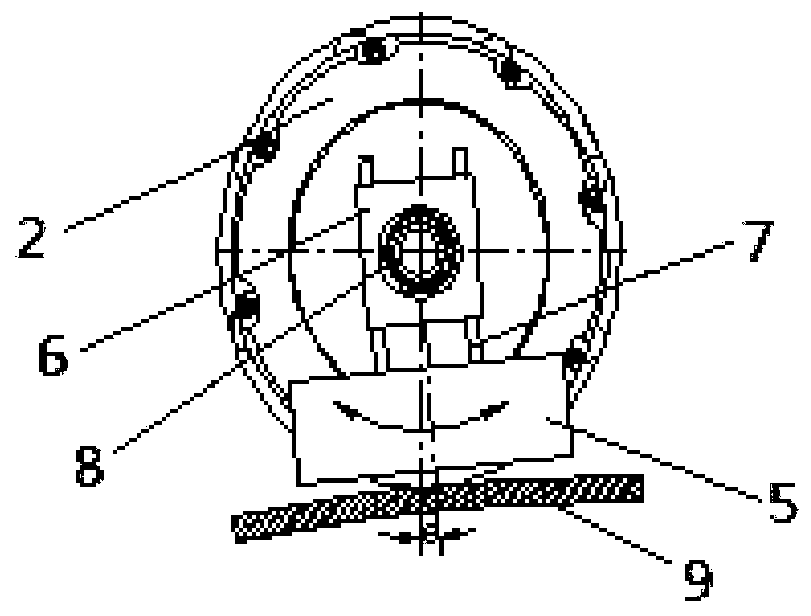
[0037] Such as figure 1 -5 shows a specific implementation of a magnetic robot involved in the present invention. The magnetic robot is a climbing device for cylindrical equipment with curved surfaces such as wind power towers and large oil tanks, and the curvature of the curved surfaces changes. The magnet...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More