

Time-varying formation swarm control method applied to unmanned aerial vehicle group
A control method and unmanned aerial vehicle technology, applied in the direction of non-electric variable control, control/adjustment system, three-dimensional position/channel control, etc., can solve the problems of unmanned aerial vehicle group formation difficulties, etc., and achieve easy computer implementation, definite control effect, Good real-time effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
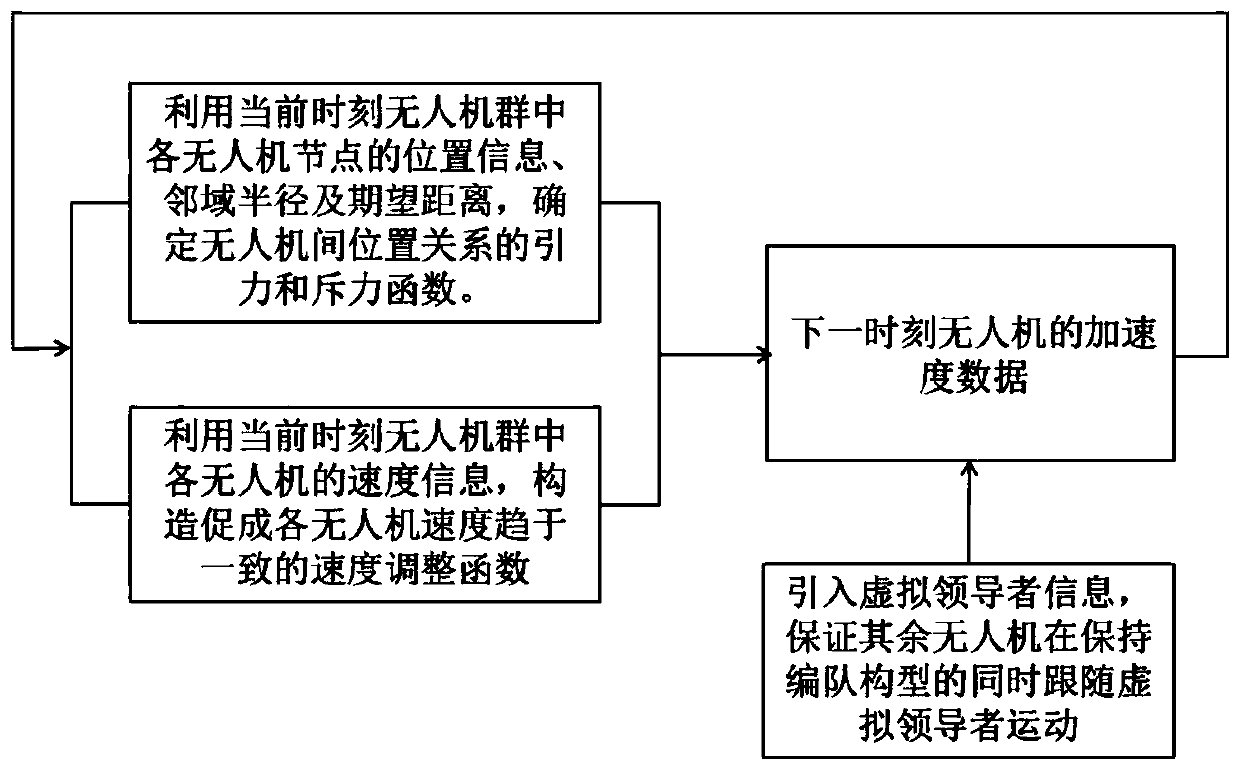
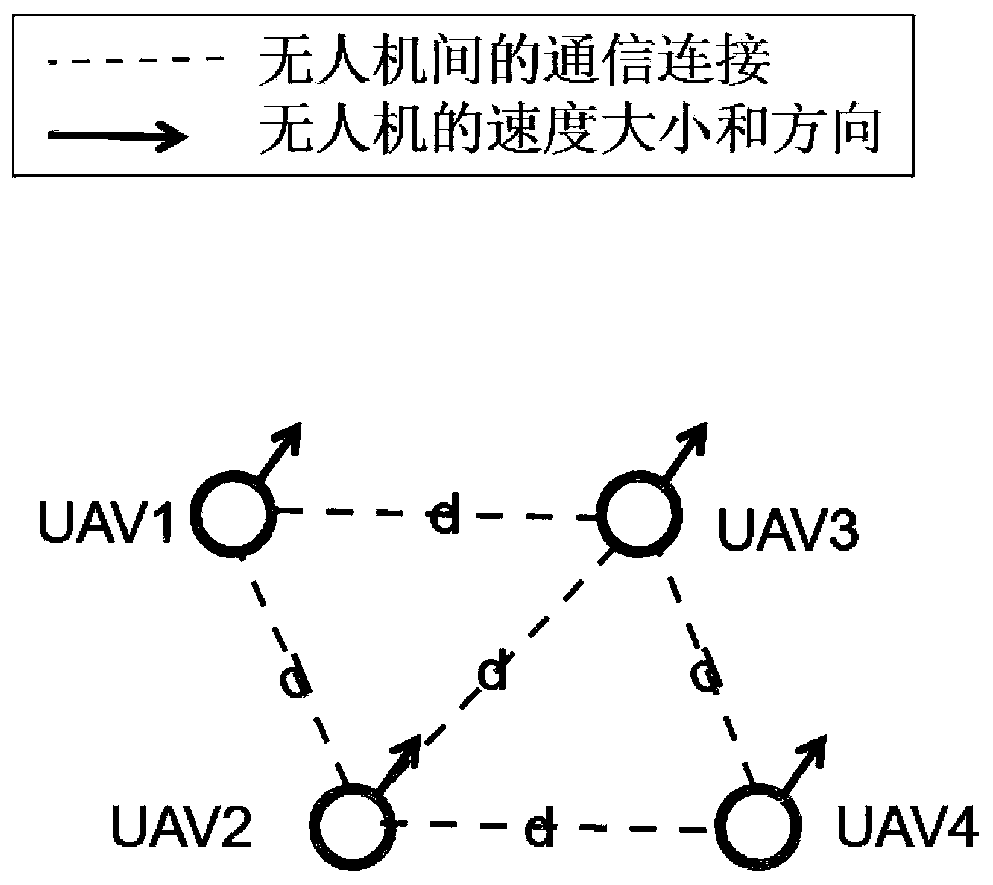
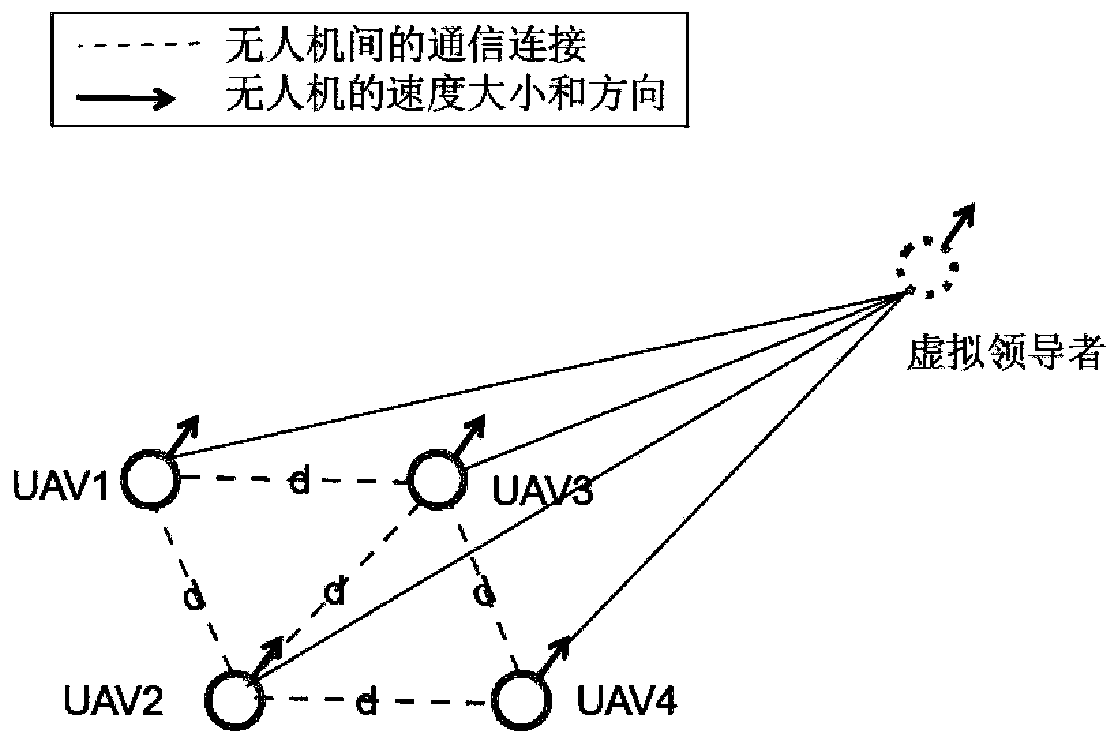
[0044] figure 1 It is a schematic block diagram of the process of the time-varying formation control method applied to the UAV swarm in the present invention. Consider an unmanned aerial vehicle swarm composed of N=4 unmanned aerial vehicles (numbered successively as UAV1, UAV2, UAV3, UAV4), and the implementation process includes the following steps:
[0045] Step 1: Obtain the motion data and communication topology of the UAV formation, and form a mobile data network for the UAV group based on this, assisting in the transmission of UAV position and speed data, the calculation and distribution of formation control quantities. Its motion data includes position, velocity and acceleration vectors.
[0046]The specific calculation process is that the topology of inter-individual communication is described as a graph G={V,E,A}, where V={1,2,...,N...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More