

Dynamic scene mapping and positioning method based on ORB-SLAM2
An ORB-SLAM2 and dynamic scene technology, applied in 3D modeling, image data processing, instruments, etc., can solve the problems of limited application, unable to remove people who have been stationary for a long time, and cannot establish static maps, etc., to achieve maintenance quality and scale , shorten the update time, and optimize the effect of robot pose
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0059] ORB-SLAM2 is a complete SLAM solution based on monocular, binocular and RGB-D cameras. It can realize the functions of map reuse, loop detection and relocation. But it assumes that the operating environment is static, which limits its application.
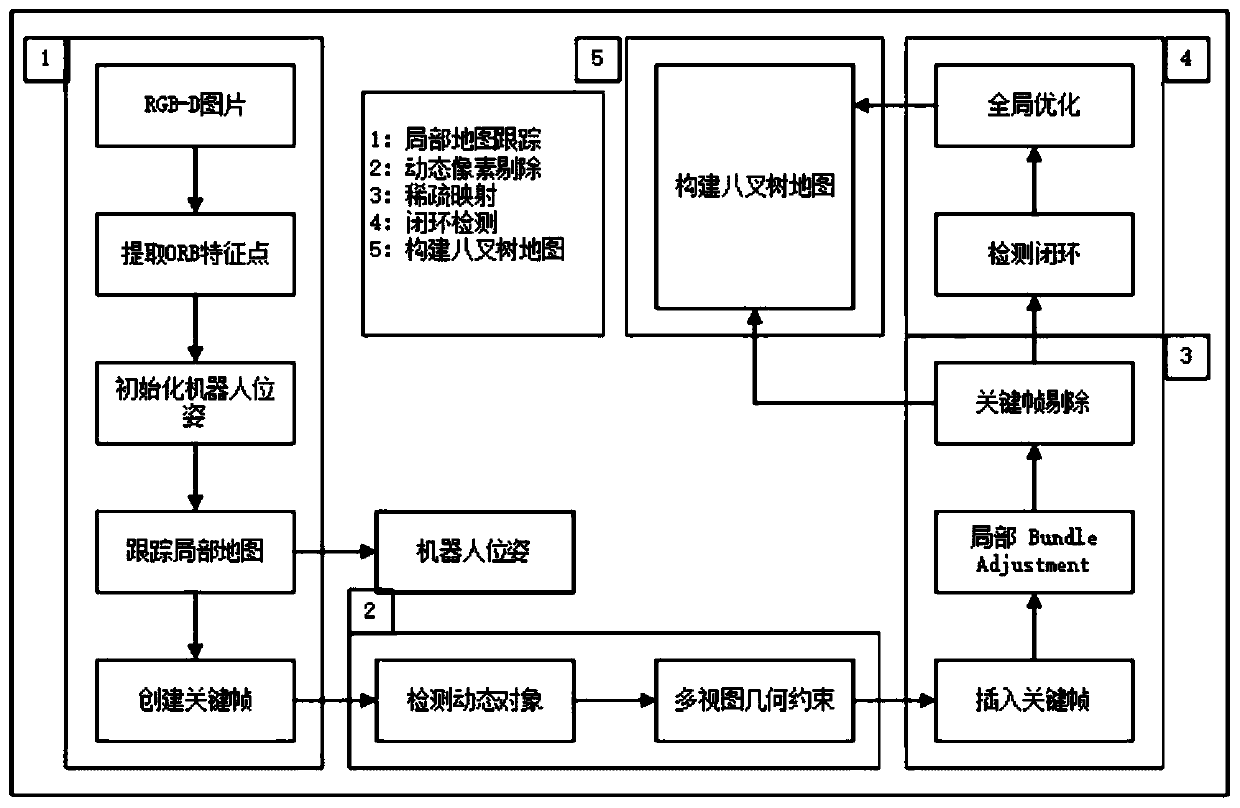
[0060] The algorithm of the present invention is proposed on the basis of the ORB-SLAM2 algorithm, which can quickly establish a clean static octree map in a dynamic environment in real time. It mainly consists of five steps: local map tracking, dynamic pixel elimination, and sparseness. Mapping, closed-loop detection and creation of octree maps, the overall flow chart is as follows figure 1 Shown. The details are as follows:
[0061] Step 1, local map tracking
[0062] Initialize the camera pose using the image information captured by the camera carried by the robot; use the first image captured by the camera as a key frame during initialization; after obtaining the initial pose, track the local map to optimize the camera pose...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More