

Method for judging whether robot collides with virtual wall or not, chip and intelligent robot
A technology of virtual walls and robots, applied in the field of intelligent robots, can solve the problems of not being able to accurately detect virtual walls, affecting the blocking effect of virtual walls, etc., and achieve the effect of high accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The technical solutions in the embodiments of the present invention will be described in detail below with reference to the drawings in the embodiments of the present invention. It should be understood that the specific embodiments described below are only used to explain the present invention, not to limit the present invention. In the following description, specific details are given to provide a thorough understanding of the embodiments. However, one of ordinary skill in the art would understand that the embodiments may be practiced without these specific details. For example, circuits may be shown in block diagrams in order not to obscure the embodiments in unnecessary detail. In other instances, well-known circuits, structures and techniques have not been shown in detail in order not to obscure the embodiments.
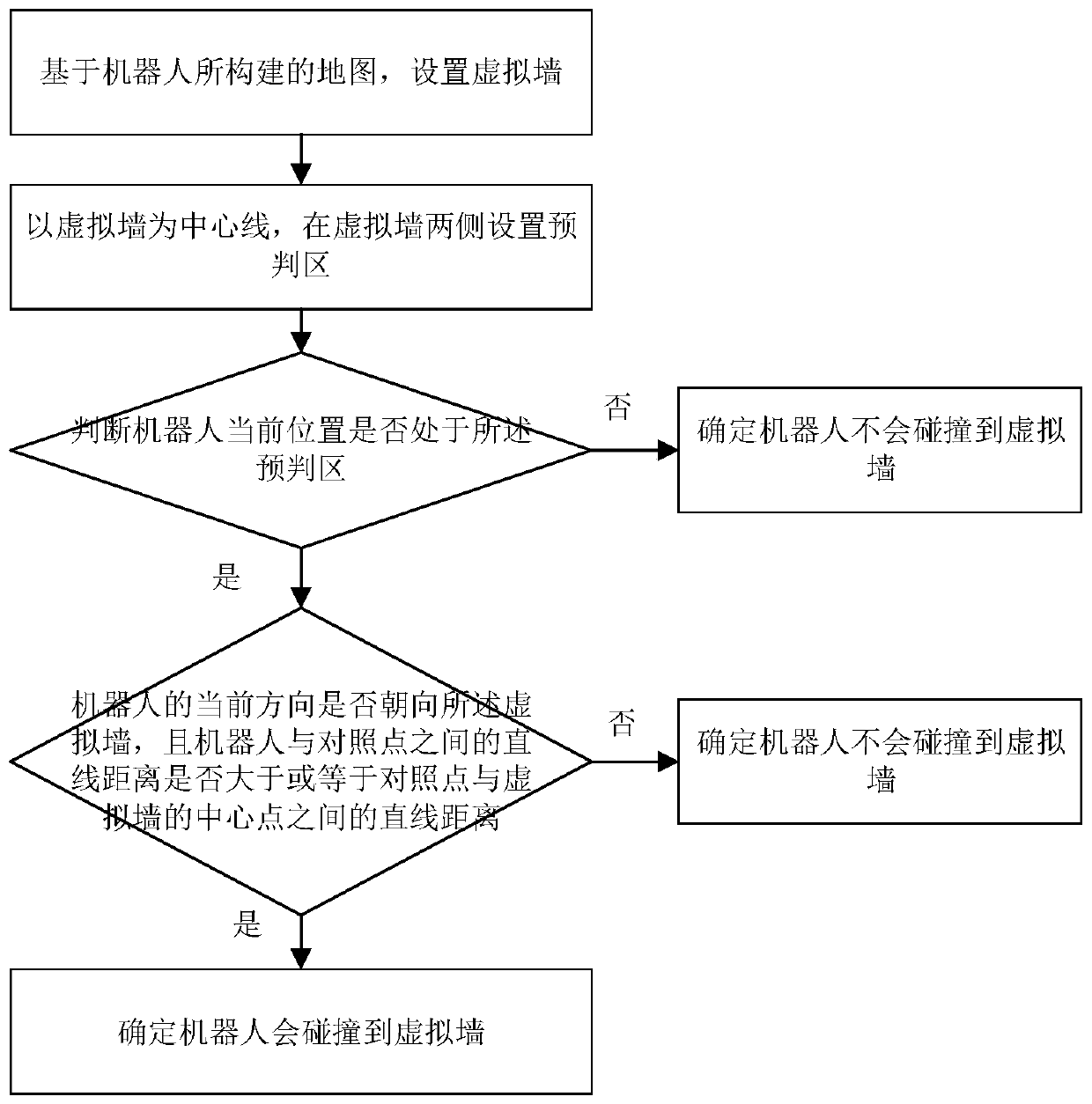
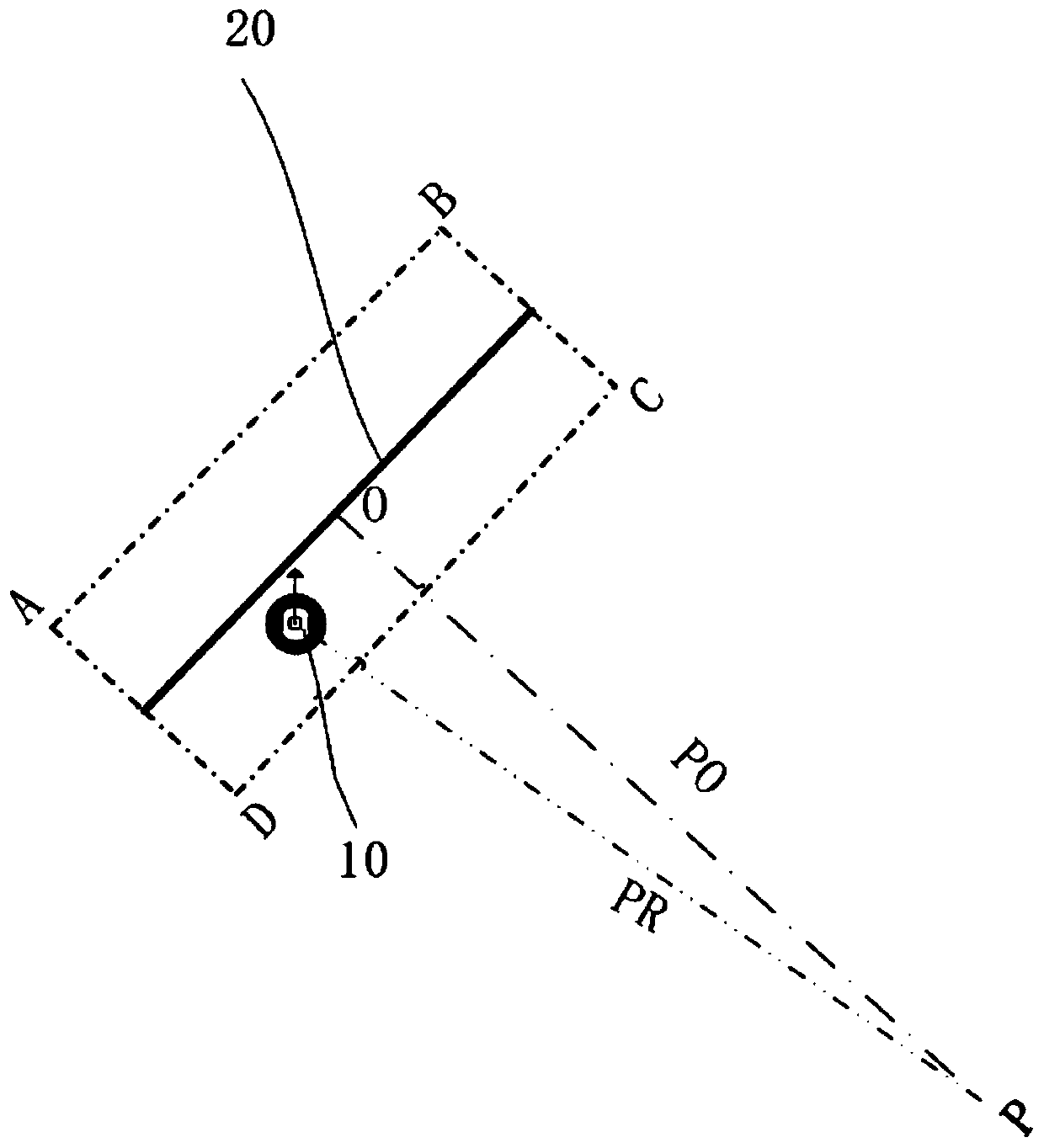
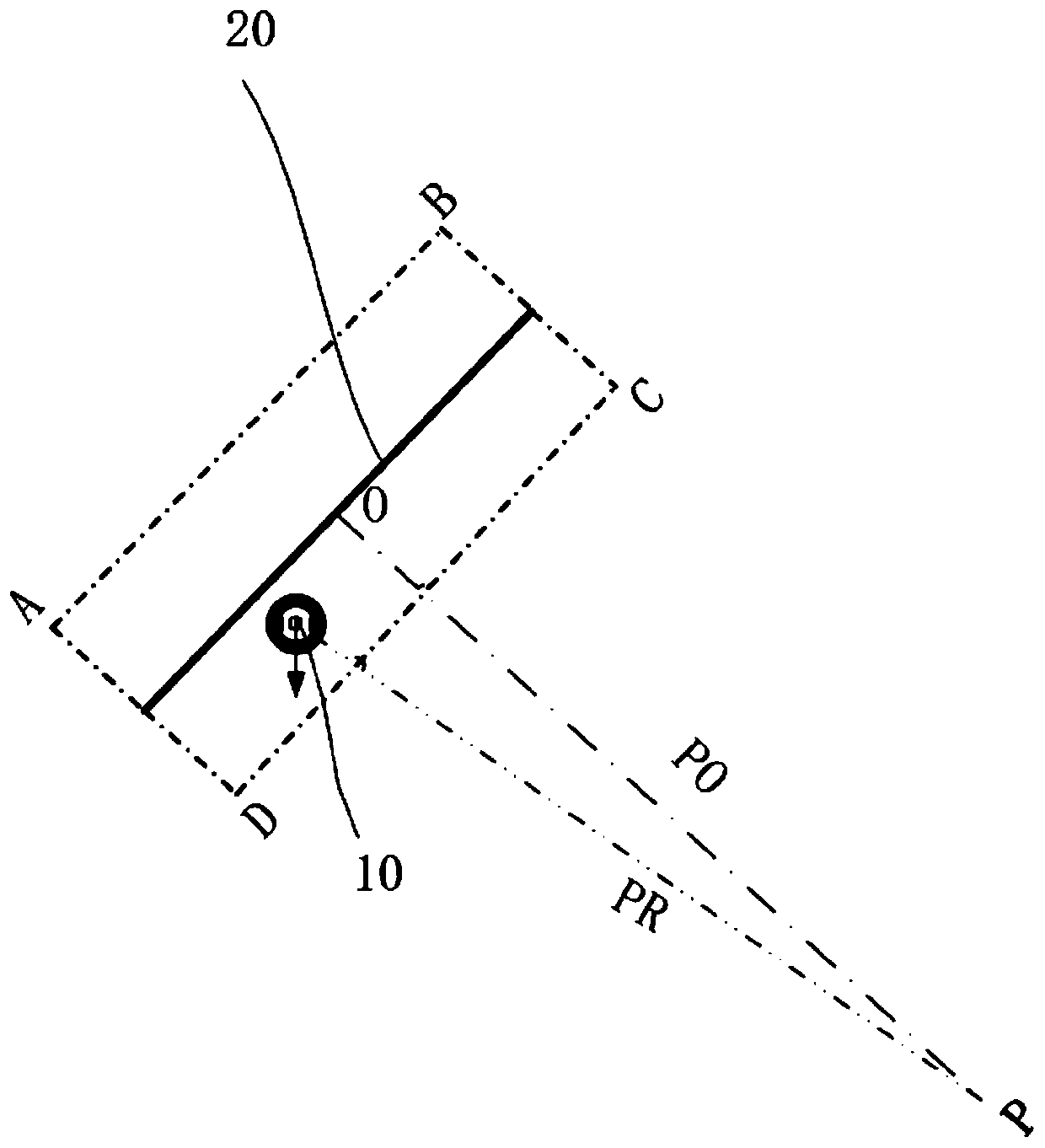
[0018] Such as figure 1 The shown method for the robot to judge whether it collides with the virtual wall is executed by the processor or the control c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More