

Man, machine and object interaction mechanical arm teaching system based on RGB-D image
An RGB-D, RGB image technology, applied in the field of human-machine-object interaction robotic arm teaching system, can solve the problems of high joint action data dimension, long training time of learning model, dimensional disaster, etc., to avoid the dimensional disaster. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
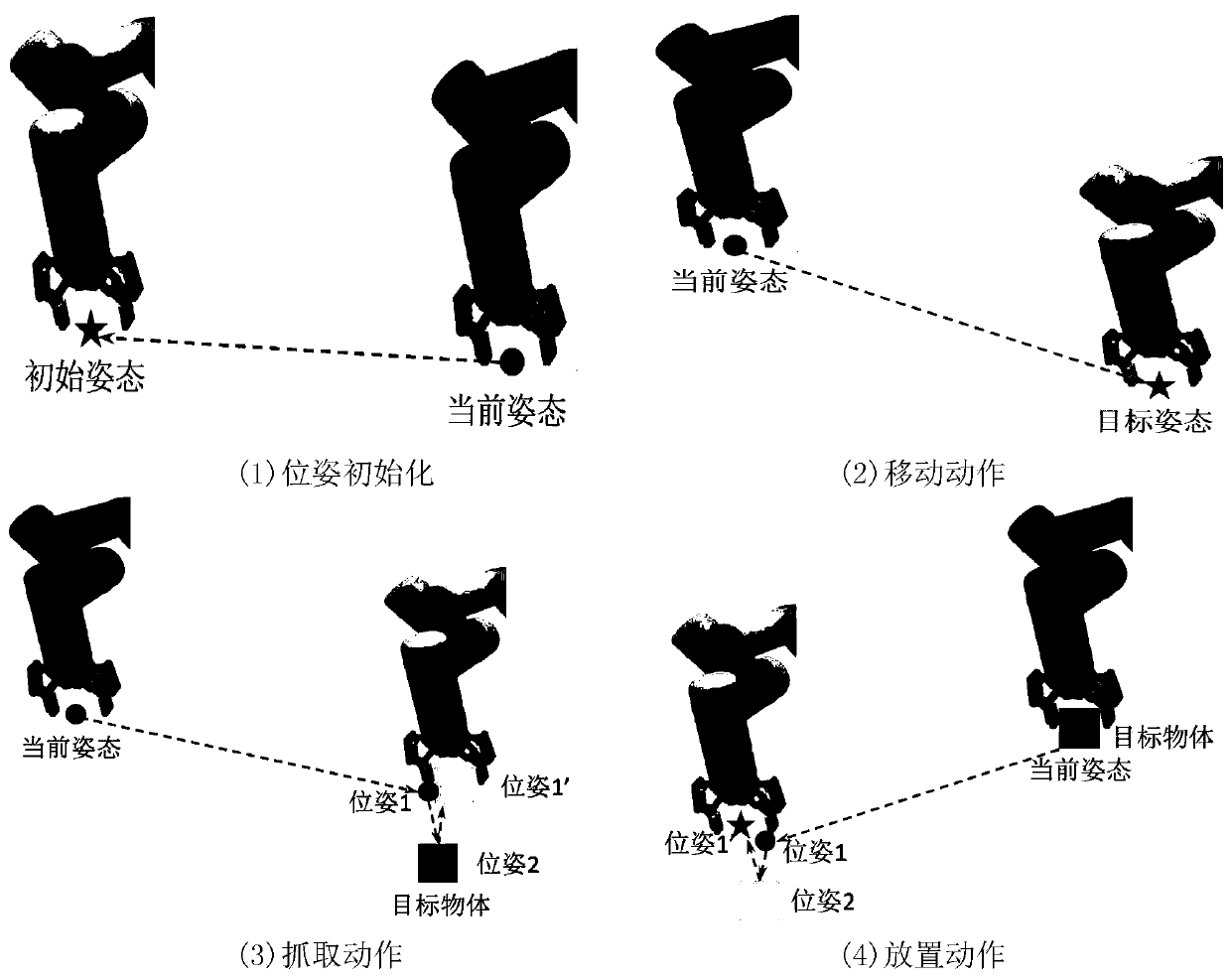
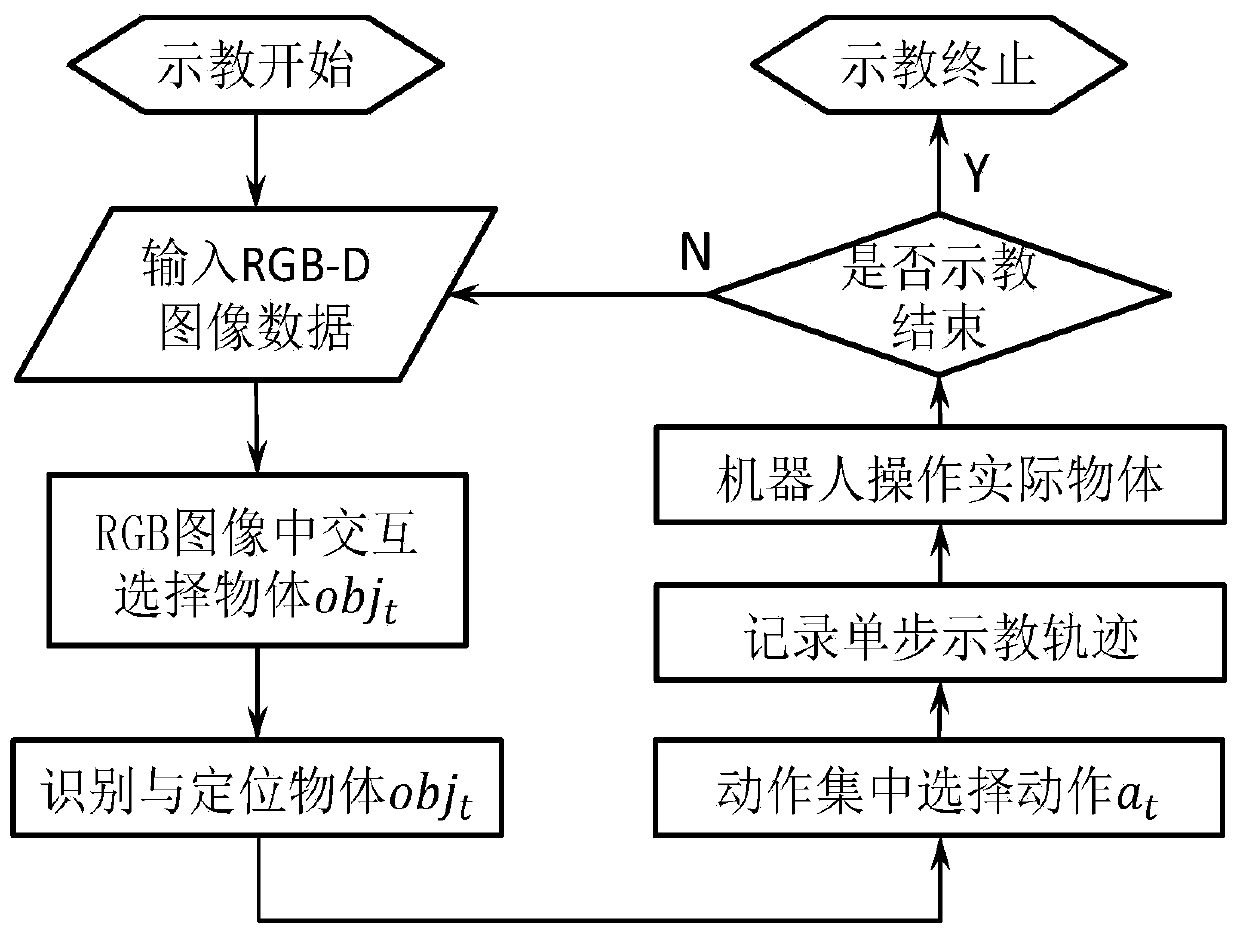
[0041] Compared with the traditional teaching method, the teaching system and method of human-computer interaction manipulator based on RGB-D image proposed by this method is a task-oriented, high-level and simple teaching method, ignoring each joint directly output abstract high-level actions, interact with objects in the RGB image space and select actions, control the manipulator to operate objects in the actual space, and can teach in the simulation environment, with high efficiency, safety and low loss, and can be realized data sharing.
[0042] In the embodiment, the following implementation modes are adopted:
[0043] The construction steps of the robot teaching platform are as follows:
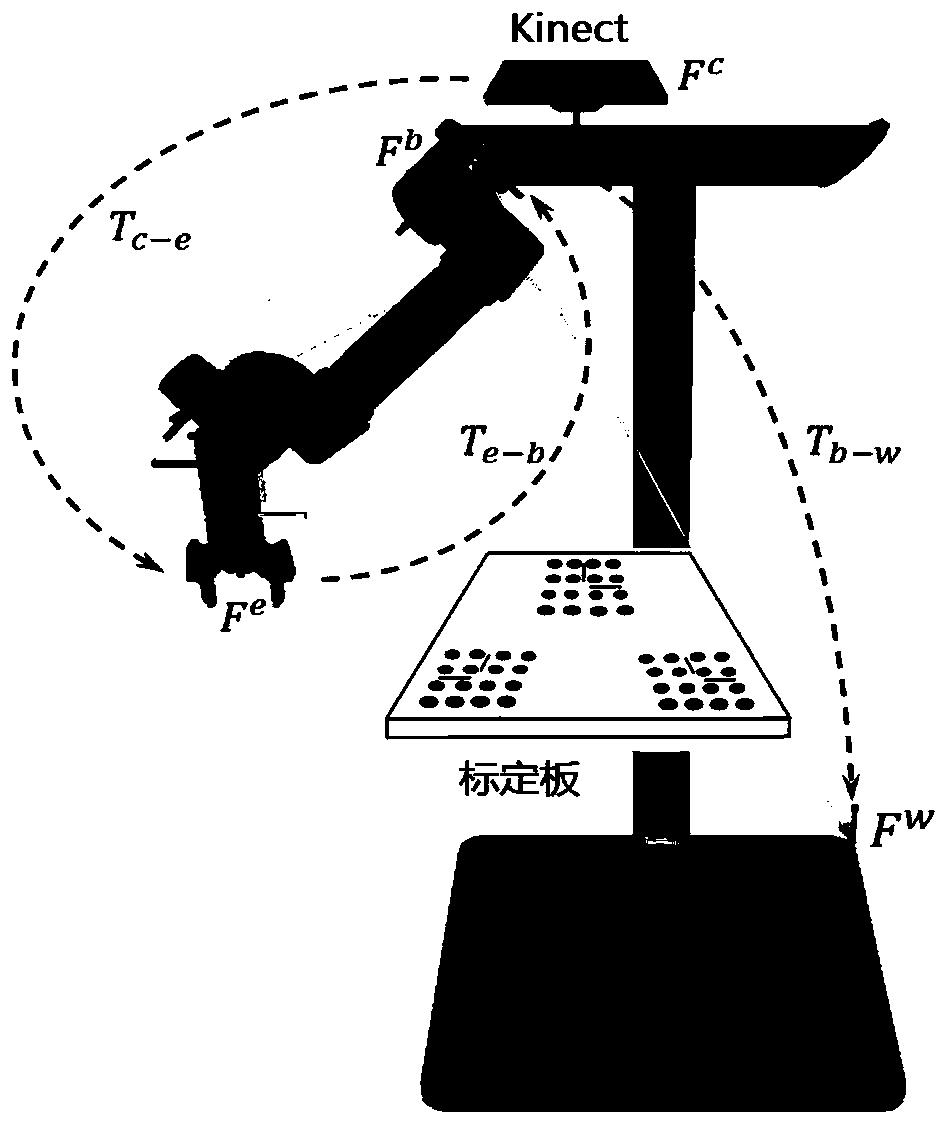
[0044] Step (1): Call the libfreenect2 driver to obtain the camera image data, subscribe to the RGB image and the point cloud image with a pixel size of 960×540, and perform the calibration of the RGB camera, the depth camera and the relative pose of the two according to the two, and e...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More