

A Complicated Surface Polishing Device
A complex curved surface and polishing technology, which is applied in the direction of grinding/polishing safety devices, grinding drive devices, grinding/polishing equipment, etc., can solve the problems of difficult control, weakening, and unstable control, and achieve high polishing precision , good supple control, good control stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
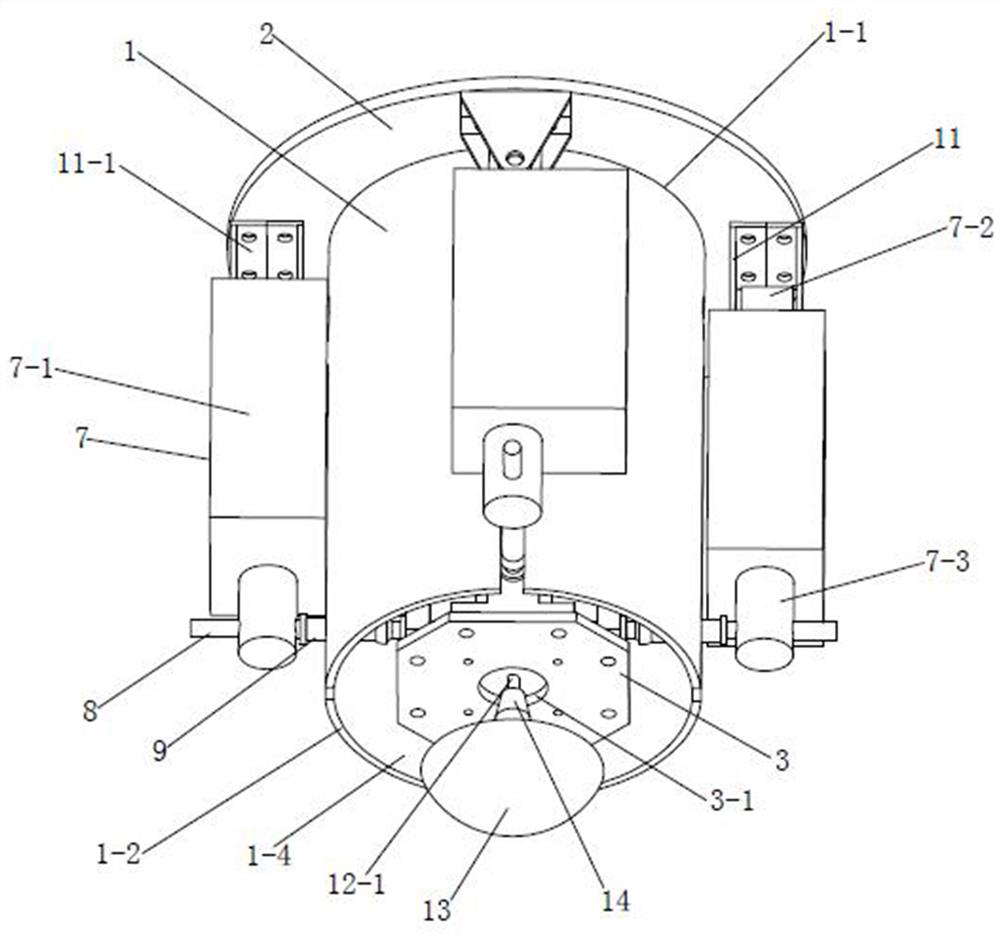
[0030] like Figure 1-3 As shown, a complex curved surface polishing device provided in this embodiment includes:
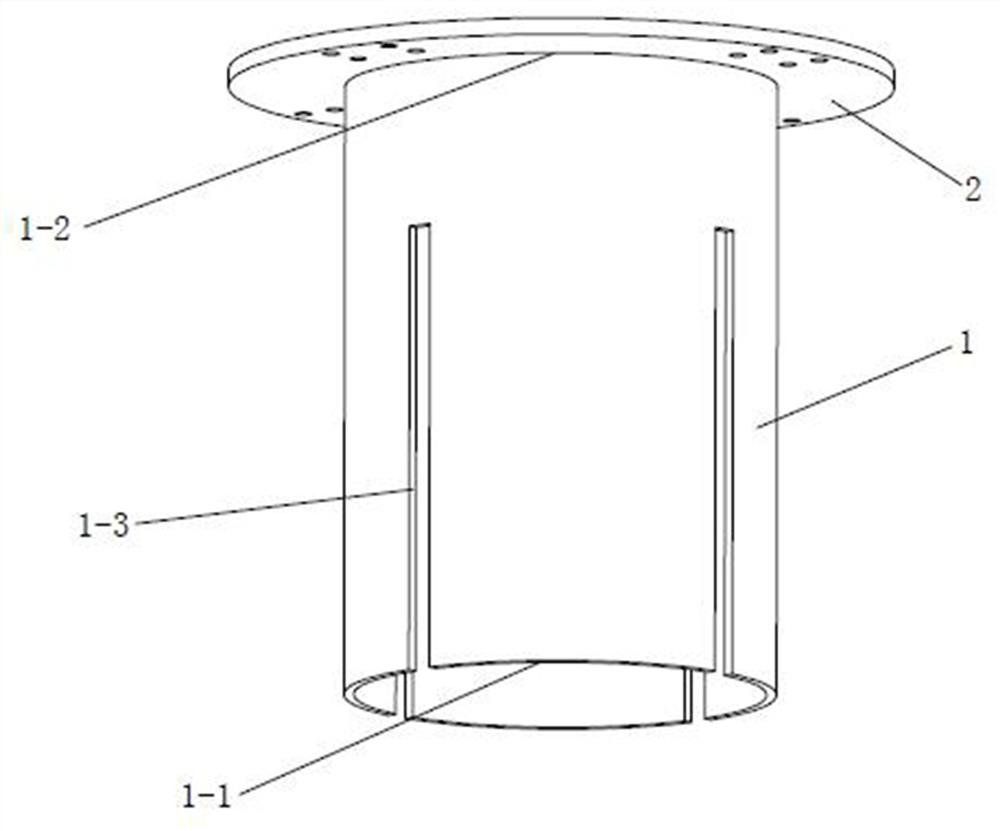
[0031] A circular tubular base 1 is provided with four grooves 1-3 evenly distributed around the center line on the side wall,
[0032] The four tanks 1-3 all extend from the first end 1-1 of the base 1 to the second end 1-2; a flange 2 is arranged on the outside of the second end 1-2, and the flange 2 directly welded to the second end 1-2, and the center lines of the flange 2 and the base 1 coincide;
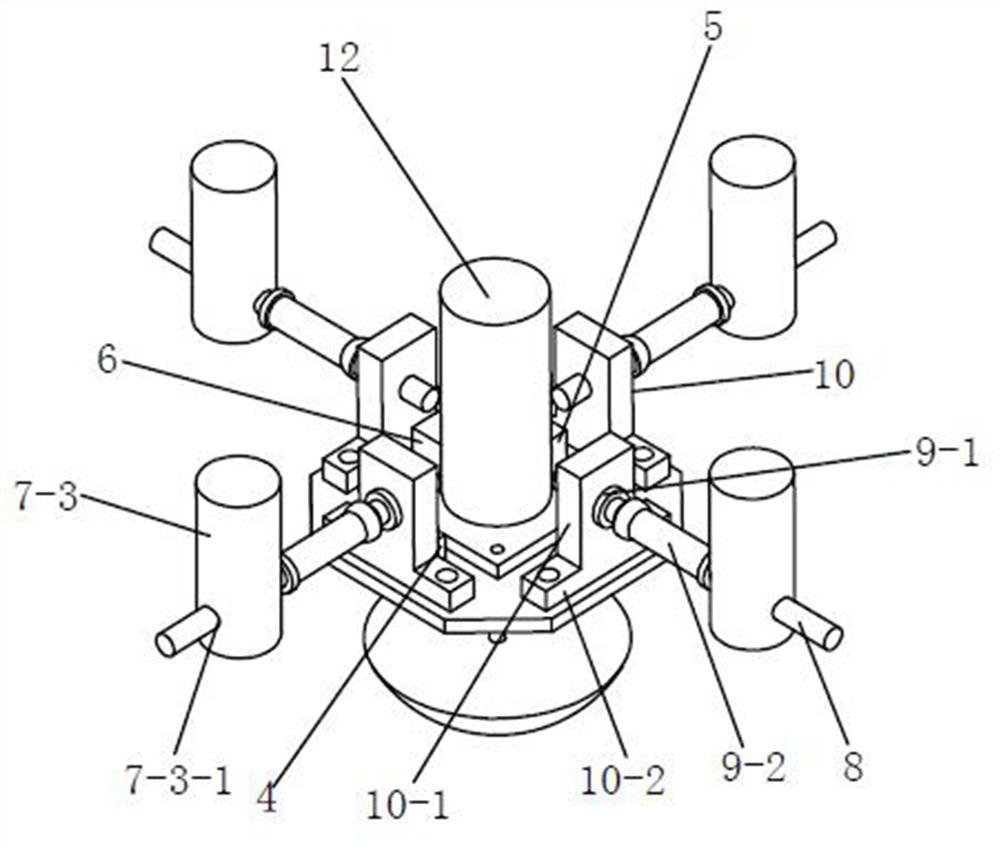
[0033] A force position control device, including a substrate 3, a multidimensional force sensor 4, an inclination sensor 5, a controller 6, four servo electric push rods 7, four connecting rods 8, four ball joint bearings 9 and four A ball joint bearing seat 10; the center of the base plate 3 is provided with a first through hole 3-1;
[0034] Wherein, the substrate 3 is located on one side of the first end 1-1 of the base 1, and the four ball joint bearing se...
Embodiment 2
[0050] A kind of complex curved surface lapping and polishing device provided in this embodiment, its general structure is consistent with embodiment 1, as Figure 4 As shown, but in this embodiment, the side wall of the base 1 is provided with four installation reserved holes 1-5 uniformly distributed around the center line, and are connected with the fasteners on the four mounting seats 11 one by one. correspond.
[0051] The aforementioned installation reserved holes 1-5 can facilitate the locking and installation of the connecting head 7-2 of the servo electric push rod 7 and the mounting seat 11 through fasteners.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More