

Wearable biological merging lower limb rehabilitation robot
A rehabilitation robot and wearable technology, applied in physical therapy, passive exercise equipment, etc., can solve the problems of poor safety, space cannot coincide with the center of the knee joint, etc., and achieve high safety, simple and convenient control, and good bionic effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] Exemplary embodiments, features, and aspects of the present invention will be described in detail below with reference to the accompanying drawings. The same reference numbers in the figures indicate functionally identical or similar elements. While various aspects of the embodiments are shown in drawings, the drawings are not necessarily drawn to scale unless specifically indicated.
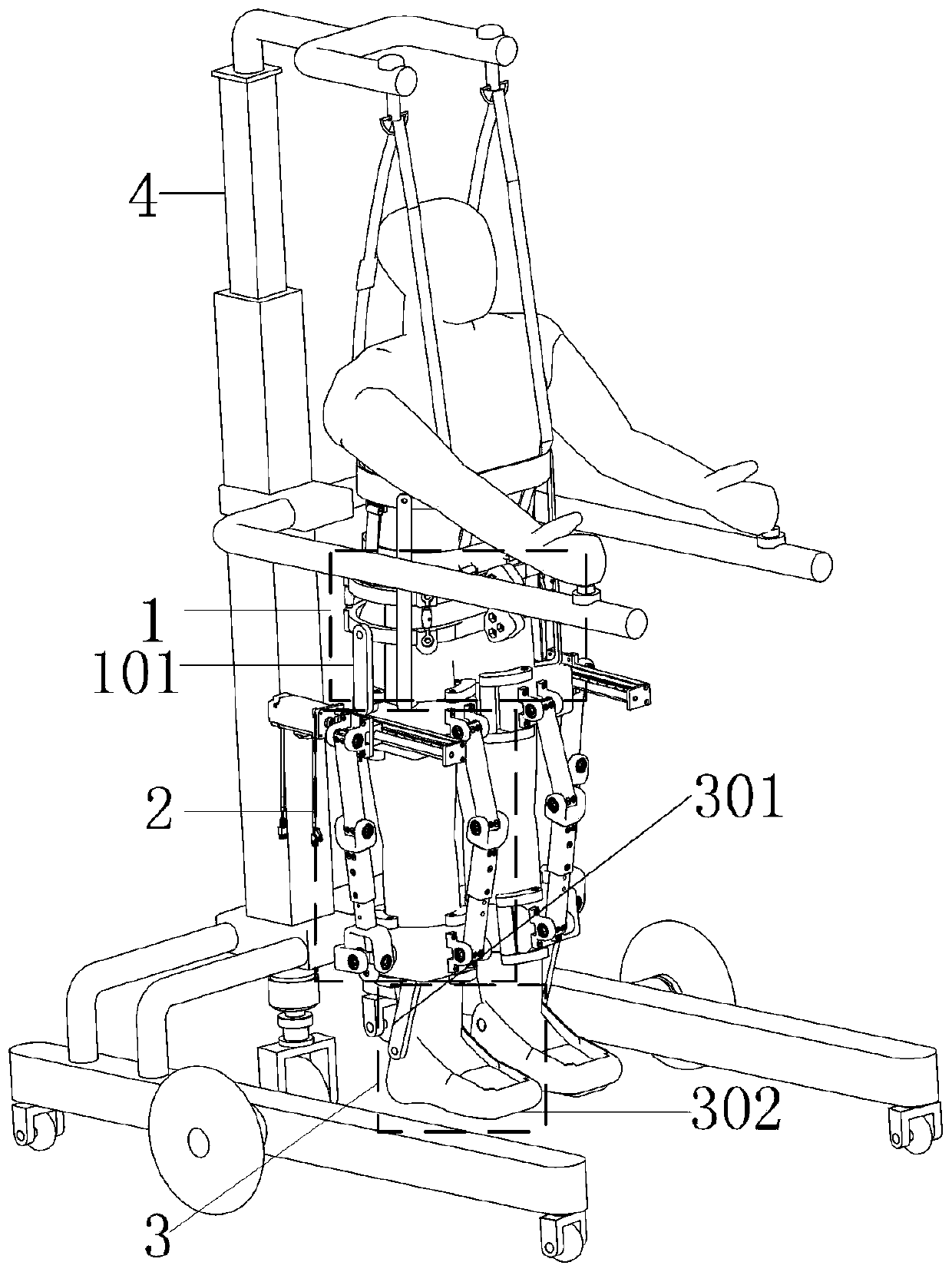
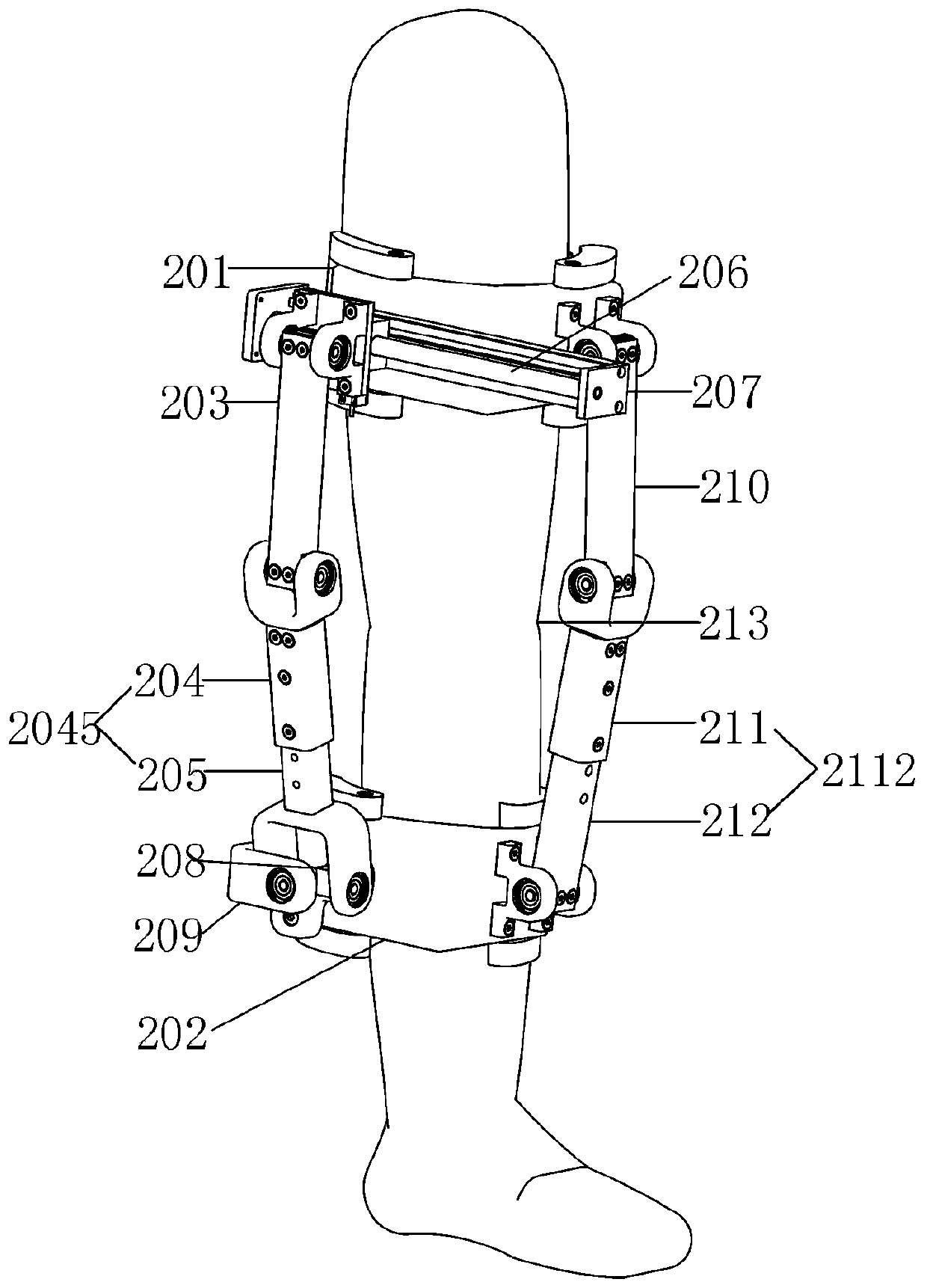
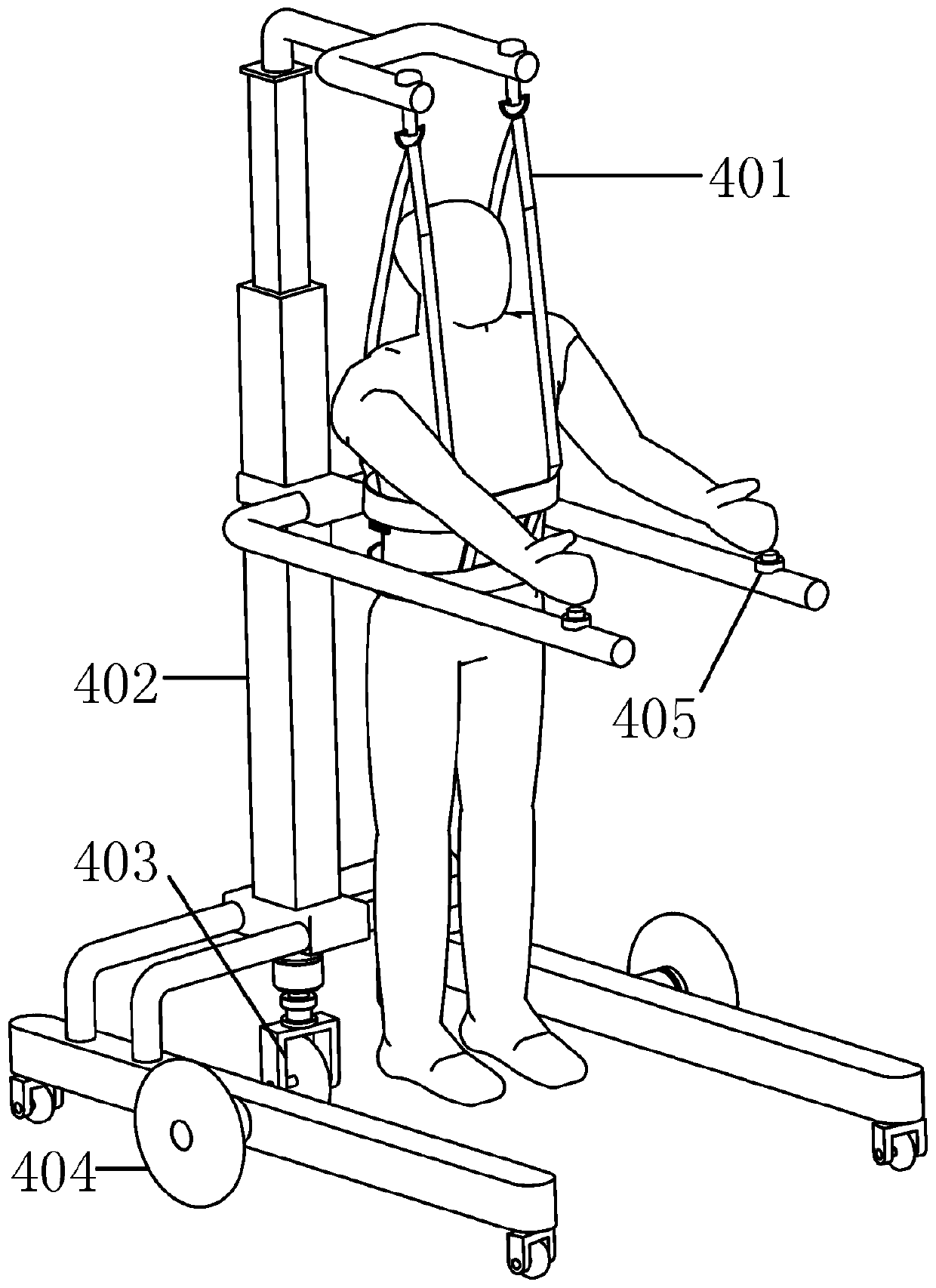
[0036] The purpose of the present invention is to provide a wearable bio-fusion lower limb rehabilitation robot to solve the problems existing in the prior art, to realize the automatic compensation of the instantaneous rotation center dislocation in the flexion and extension of the human knee joint, and to realize motion decoupling at the same time, so as to avoid knee Joints suffer from secondary injuries, improve wearing comfort, and enhance the effect of knee joint rehabilitation.
[0037]In order to achieve the above object, the present invention provides the following solution: the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More