

Engineering vehicle automatic height and speed limiting safety control system and control method thereof
A technology of engineering vehicles and control methods, which is applied in control/regulation systems, non-electric variable control, speed/acceleration control, etc., can solve the problems of blocking the driver's sight, running height detection and safety monitoring, collision accidents, etc., to achieve Improved safety and comfort
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
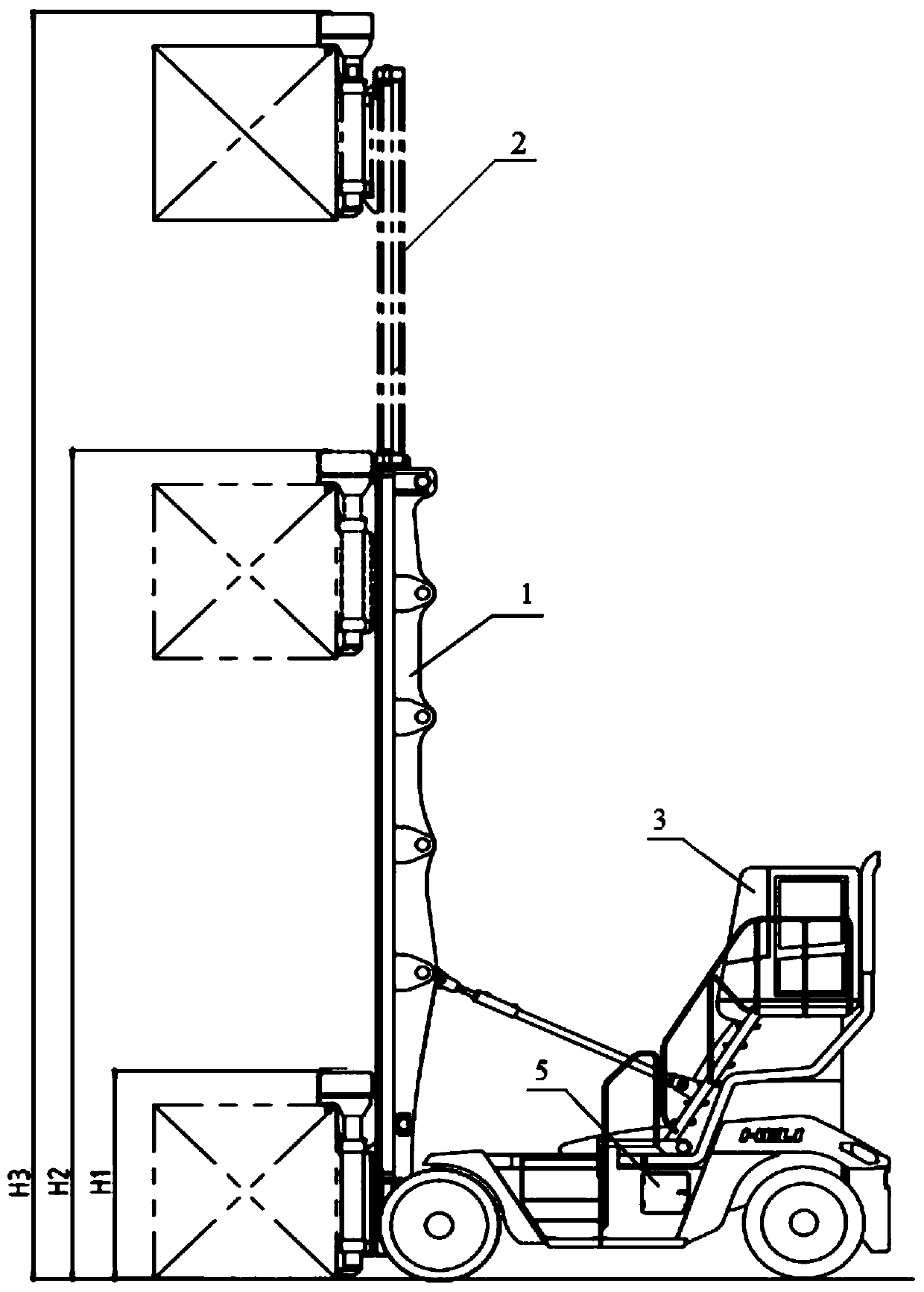
[0031] A control method for automatically limiting the height and speed of an engineering vehicle, first setting the reference values of the rising stroke height of the mobile mast: H1, H2, H3, wherein H1<H2<H3, H1 is the minimum height of the mobile mast (the mobile mast drop to the limit height value), H2 is the safety height of the mobile gantry (the height of the mobile gantry does not exceed the fixed gantry); H3 is the highest height of the mobile gantry (the height of the mobile gantry rising to the limit); set 105 %H1~95%H2 is the safe operating height range, and then follow the steps below:
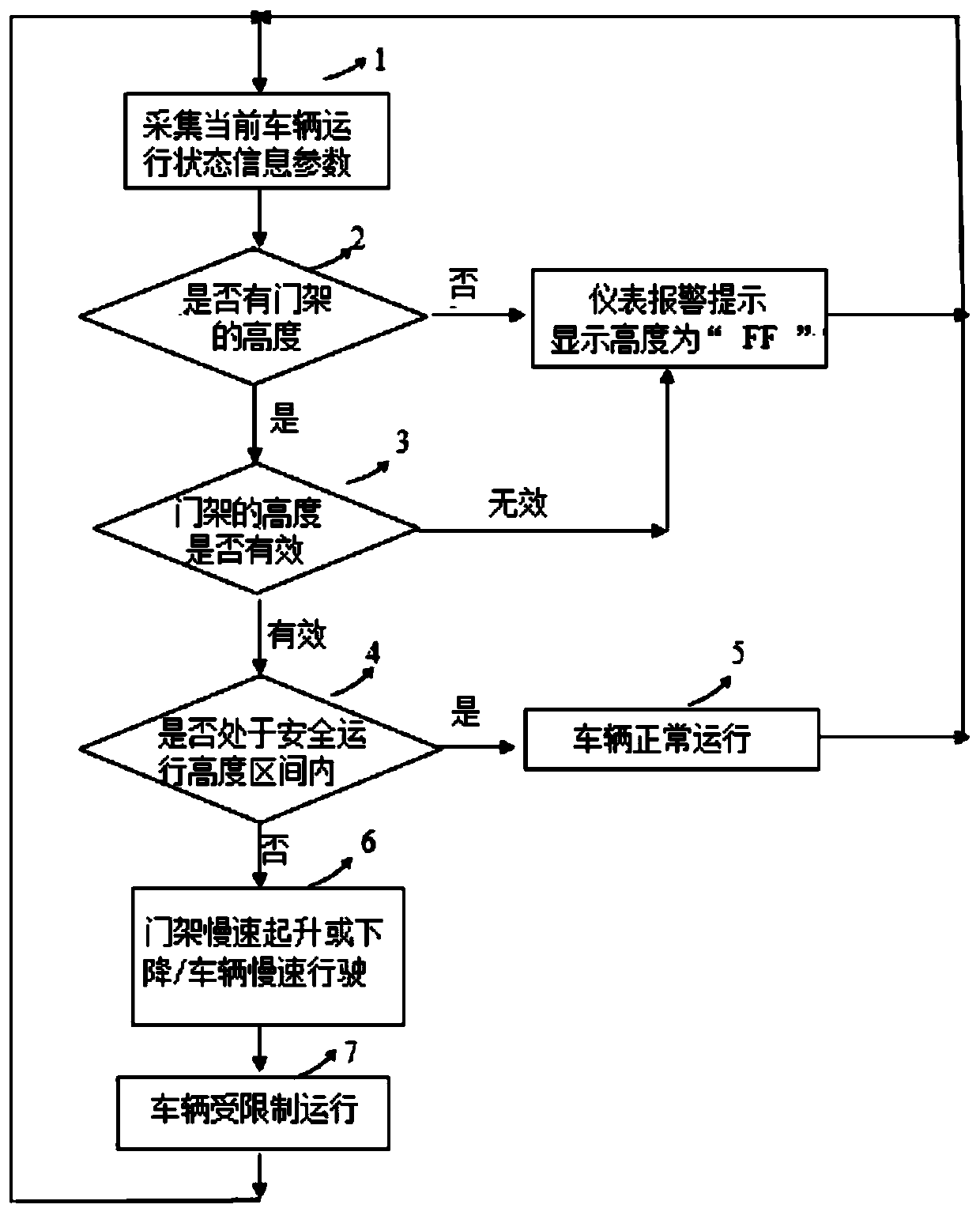
[0032] (1) Collect current vehicle operating state information parameters;
[0033] (2) Judging whether the current vehicle running status information parameter has the height H of the mobile mast; if yes, enter step (3); if not, return to step (1);
[0034] (3) Compare the numerical values of H and H3; when H>H3, it is an invalid parameter, and return to step (1); when H≤H3...
Embodiment 2
[0047] For the convenience of accurate description, the empty container stacker is used as the case model here, such as image 3 As shown, a control method for automatic height and speed limit of engineering vehicles, first set the height reference value of the rising stroke of the mobile mast: H1 (2500mm), H2 (8080mm), H3 (14050mm), set 2625 ~ 7676mm as the safe Run the altitude interval, then proceed as follows:
[0048] (1) Collect current vehicle running state information parameters;
[0049] (2) Judging whether the current vehicle running status information parameter has the height H of the mobile mast; if yes, enter step (3); if not, return to step (1);
[0050] (3) Determine whether the H value is valid; when H>14050mm, it is an invalid parameter, and return to step (1); when H≤14050mm, it is a valid parameter, and enter step (4);
[0051] (4) Judging whether H is within the safe operating height range of 2625-7676mm; if yes, proceed to step (5); if not, proceed to st...
Embodiment 3
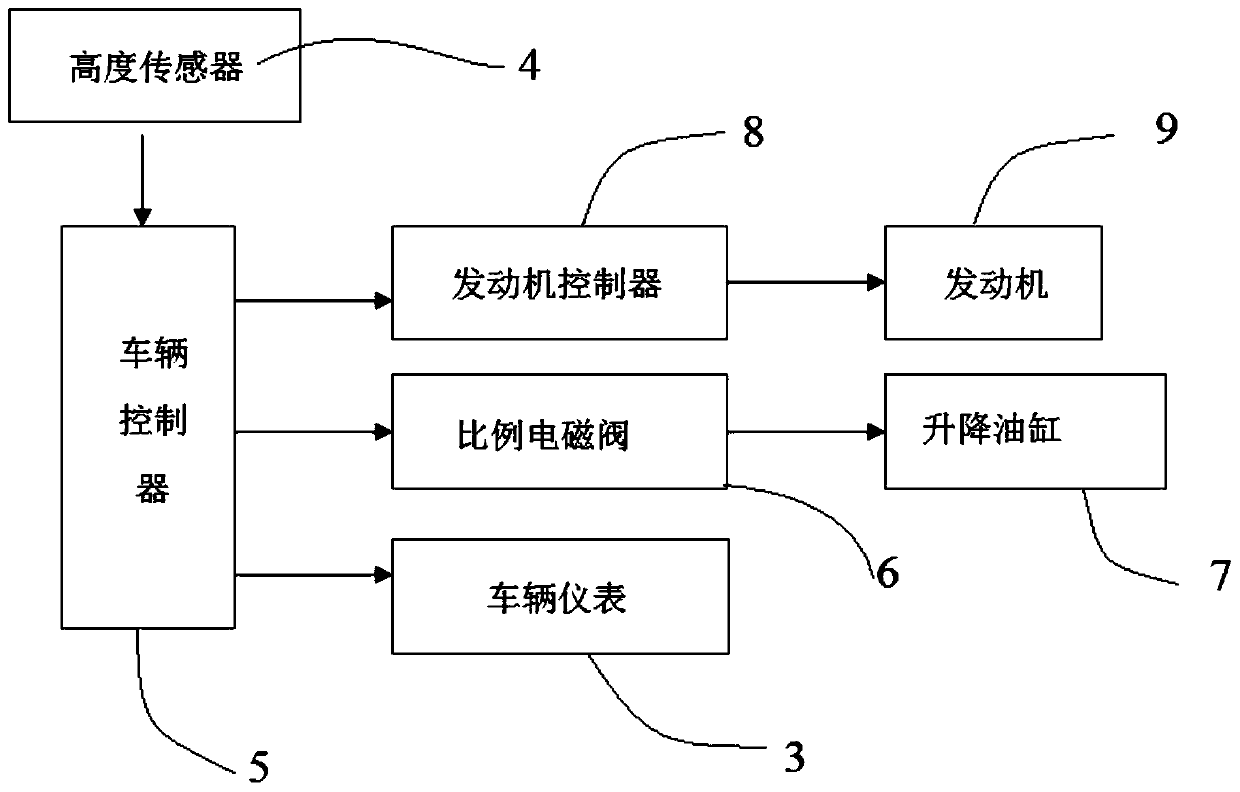
[0063] Such as Figure 1-3 As shown, a safety control system for realizing the control method described above includes a vehicle controller 5, an engine 9, a fixed mast 1, a movable mast 2, and a lifting cylinder 7 for driving the mobile mast 1 to lift; A height sensor 4 for detecting the height of the gantry is installed on the movable gantry 1, the engine 9 is connected with an engine controller 8, and the oil inlet end of the lifting cylinder 7 is connected with a proportional solenoid valve 6 in series; the height sensor The output end of 4 is connected with the input end of the vehicle controller 5, and the output end of the vehicle controller 5 is connected with the input end of the engine controller 8 and the proportional solenoid valve 6.
[0064] In a further solution, the output terminal of the vehicle controller 5 is connected with a vehicle instrument 3 . In order to grasp the running height status of the mobile mast and the running speed of the vehicle in real ti...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More