

Mthod for compensating temperature error of micro-electromechanical inertial measurement unit
An inertial measurement unit and temperature error technology, applied in the field of inertia, can solve the problems of not being able to truly describe the nonlinear characteristics of temperature error, failing to meet the requirements of compensation accuracy, easily falling into local optimal solutions, etc., to achieve the realization of nonlinear systems. Modeling, achieving accuracy, and accurately compensating the effect of temperature drift
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0058] Exemplary embodiments of the present disclosure will be described in more detail below with reference to the accompanying drawings. Although exemplary embodiments of the present disclosure are shown in the drawings, it should be understood that the present disclosure may be embodied in various forms and should not be limited by the embodiments set forth herein. Rather, these embodiments are provided for more thorough understanding of the present disclosure and to fully convey the scope of the present disclosure to those skilled in the art.
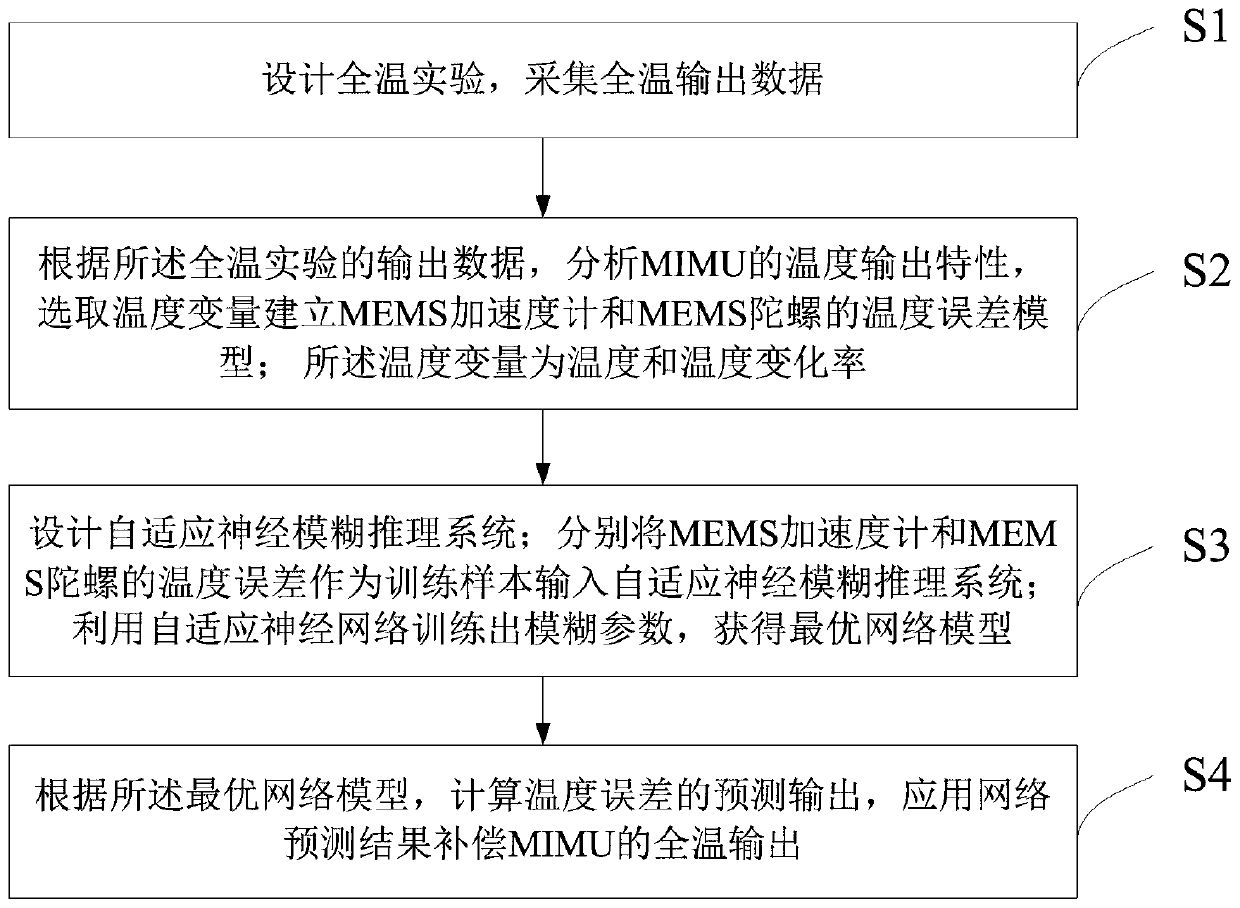
[0059] A method for temperature error compensation of micro-electromechanical inertial measurement units provided by an embodiment of the present invention, refer to figure 1 , the method includes:
[0060] S1. Design full-temperature experiments and collect full-temperature output data;
[0061] S2, according to the output data of described full temperature experiment, analyze the temperature output characteristic of MIMU, select...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More