

Accurate positioning method and system suitable for robot and robot
A precise positioning and robotics technology, applied in the field of robotics, can solve problems such as difficult evaluation of system errors, hardware errors, power unit errors, etc., and achieve the effect of precise positioning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] In order to better understand the technical content of the present invention, specific embodiments are given together with the attached drawings for description as follows.
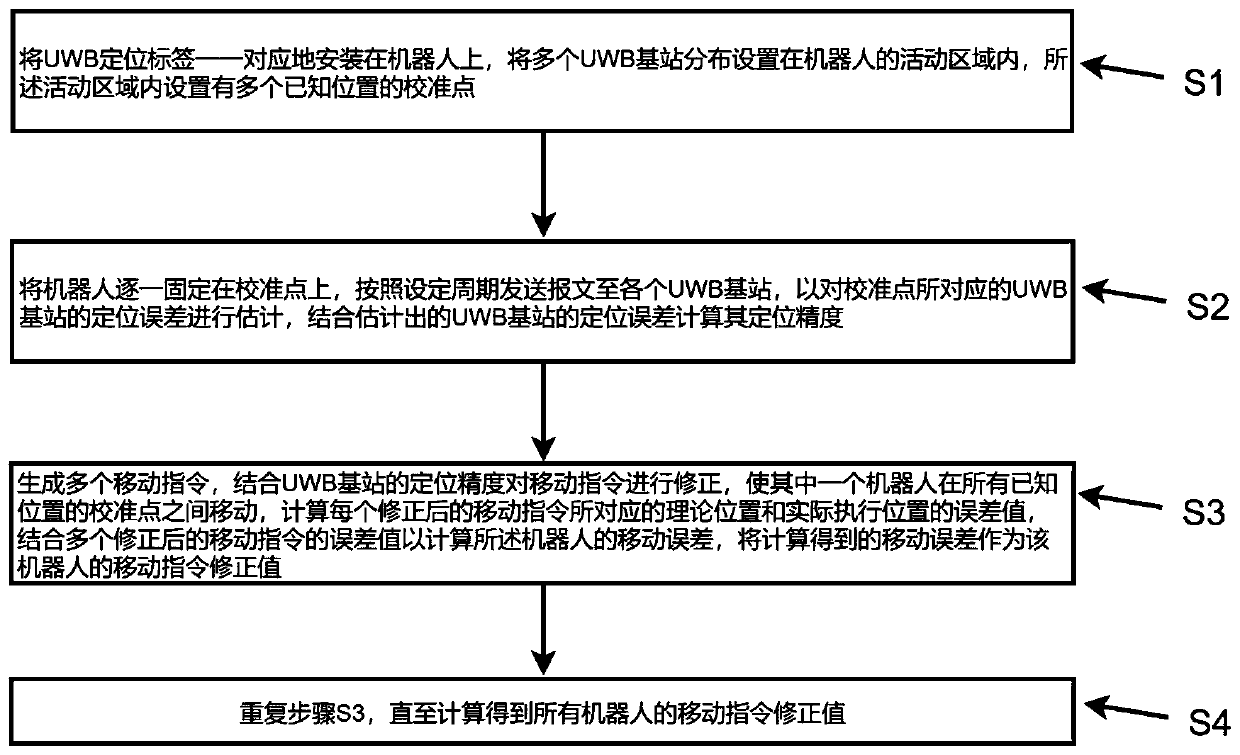
[0048] to combine figure 1 , the present invention proposes a precise positioning method suitable for robots, the positioning method comprising:
[0049] S1: Install UWB positioning tags on the robot in one-to-one correspondence, and distribute multiple UWB base stations in the active area of the robot, and set multiple calibration points with known positions in the active area.
[0050] S2: Fix the robots on the calibration points one by one, and send messages to each UWB base station according to the set period to estimate the positioning error of the UWB base station corresponding to the calibration point, and calculate its positioning based on the estimated positioning error of the UWB base station precision.
[0051] S3: Generate multiple movement instructions, and correct the movement instr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More