

Adaptive fault-tolerant anti-interference control method of mechanical arm system
A technology of adaptive controller and control method, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as the reduction of system fault tolerance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0058] The drawings constituting a part of the present invention are used to provide a further understanding of the present invention, and the schematic embodiments and descriptions of the present invention are used to explain the present invention, and do not constitute an improper limitation of the present invention.
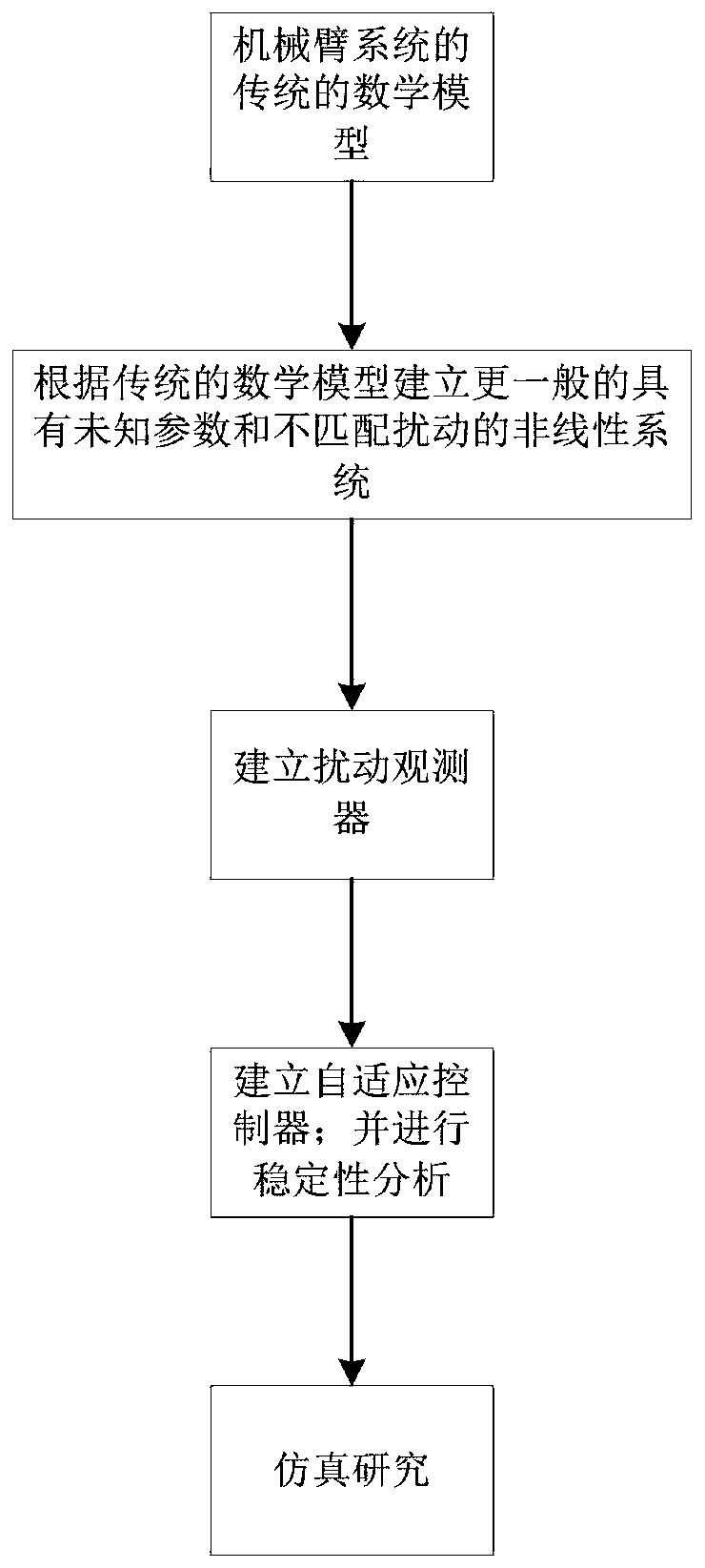
[0059] This embodiment provides an adaptive fault-tolerant and anti-interference control method for a manipulator system. The method specifically includes the following steps:
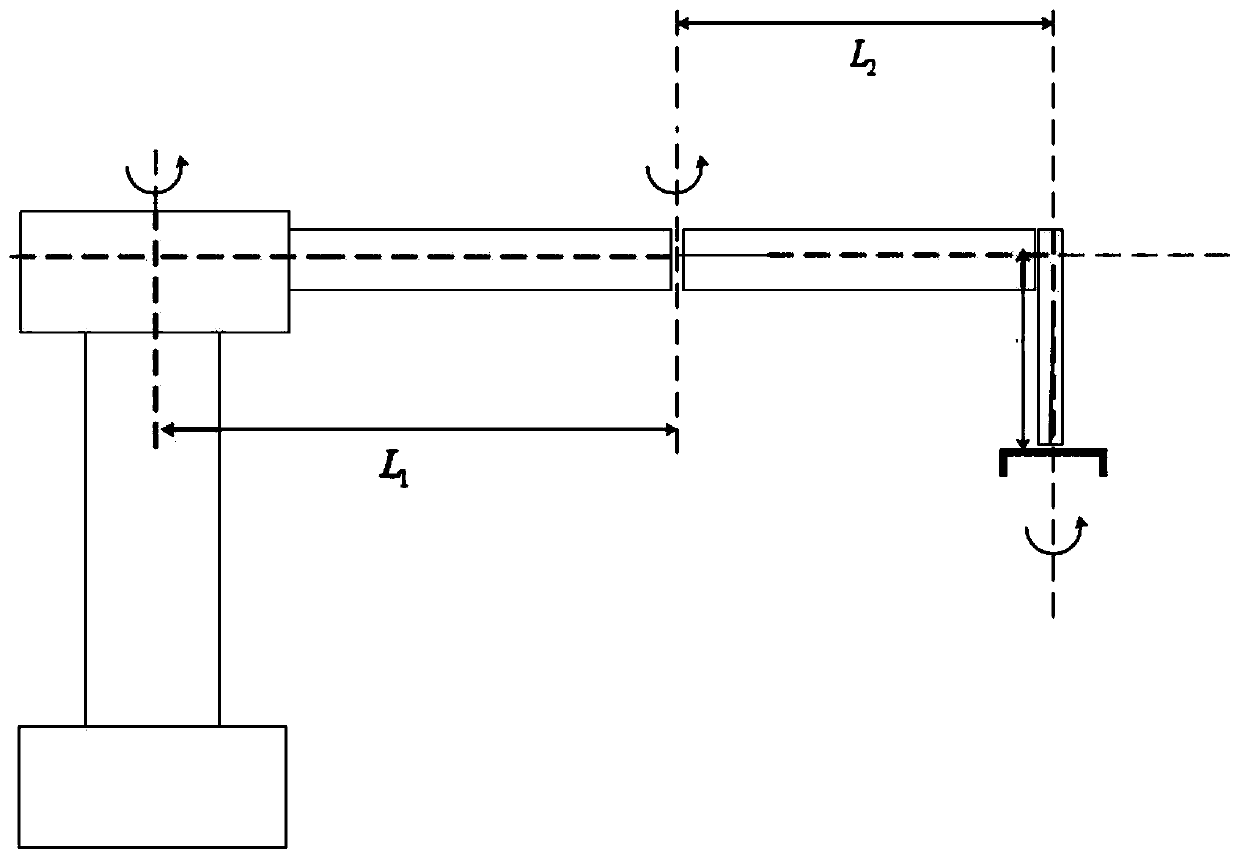
[0060] Step 1, establishing a mathematical model of the manipulator system;
[0061] The control problem of manipulator is a valuable research topic. The dynamics of the manipulator are defined by the following nonlinear equation:
[0062]
[0063] The definitions of variables and parameters of system (1) are shown in Table 1.
[0064] Table 1: Define variables and parameters in the robot arm
[0065]
[0066]
[0067] Define tracking error:
[0068]
[0069] where q d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More