

Binocular stereo matching method based on convolutional neural network
A technology of binocular stereo matching and convolutional neural network, which is applied in the field of binocular stereo matching based on convolutional neural network, can solve the problems of huge memory consumption and computing processing power, unable to accurately find pixel matching points, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0048] The purpose of the present invention is to provide a binocular stereo matching method based on convolutional neural network, which can complete the training of the network end-to-end without any post-processing process, so as to solve the problem of existing stereo matching method based on convolutional neural network. Pathological regions cannot accurately find matching points corresponding to pixels, while significantly reducing memory usage and runtime during training / inference.
[0049] The present invention will be described in detail below in conjunction with the accompanying drawings. It should be noted that the described embodiments are only intended to facilitate the understanding of the present invention, rather than limiting it in any way.
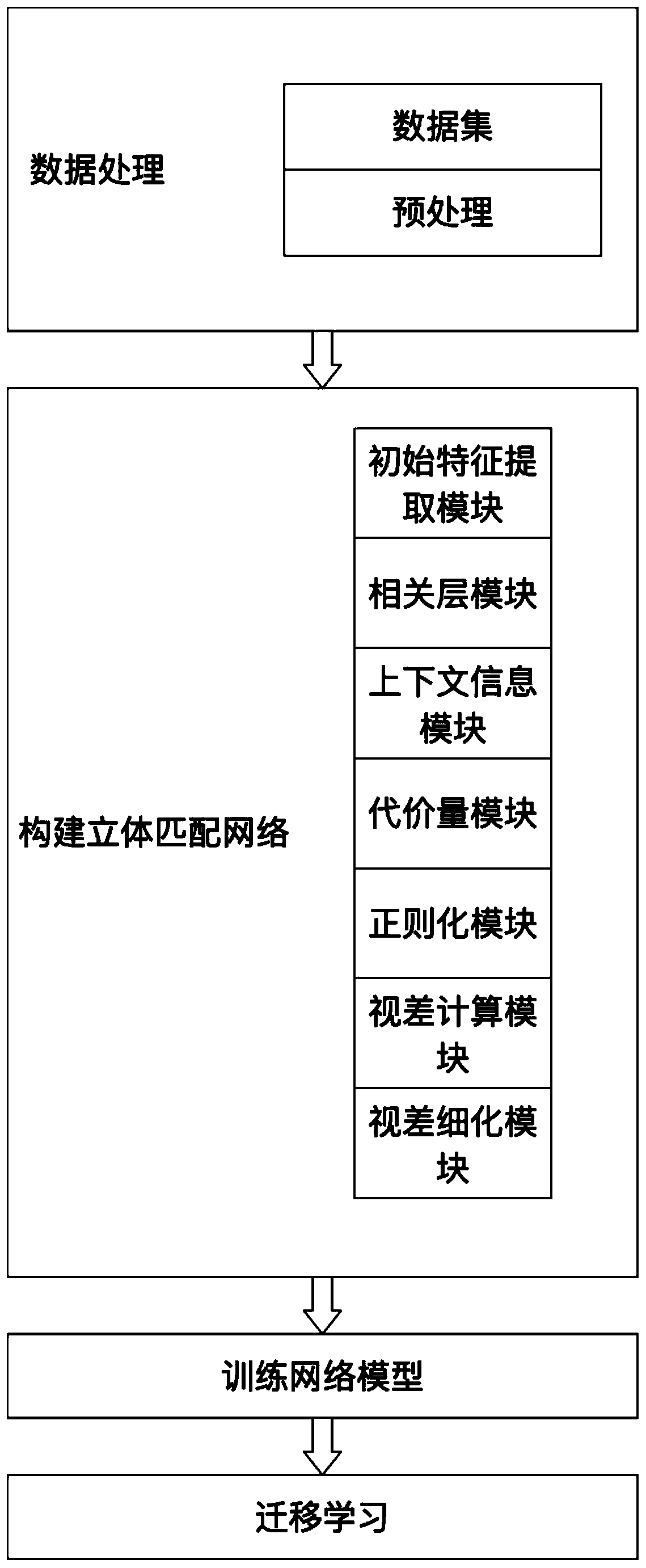
[0050] figure 1 It is the network flowchart of the binocular stereo matching method based on the convolutional neural network provided by the present invention.
[0051] figure 2 It is the network structure diagram of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More