

Intelligent automobile multi-prediction-range model prediction trajectory tracking control method and system
A model prediction and smart car technology, applied in control/adjustment system, vehicle position/route/height control, control device, etc., can solve problems such as vehicle control requirements and control functions, and improve accuracy and stability Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0013] The present invention will be further described below in conjunction with accompanying drawing.
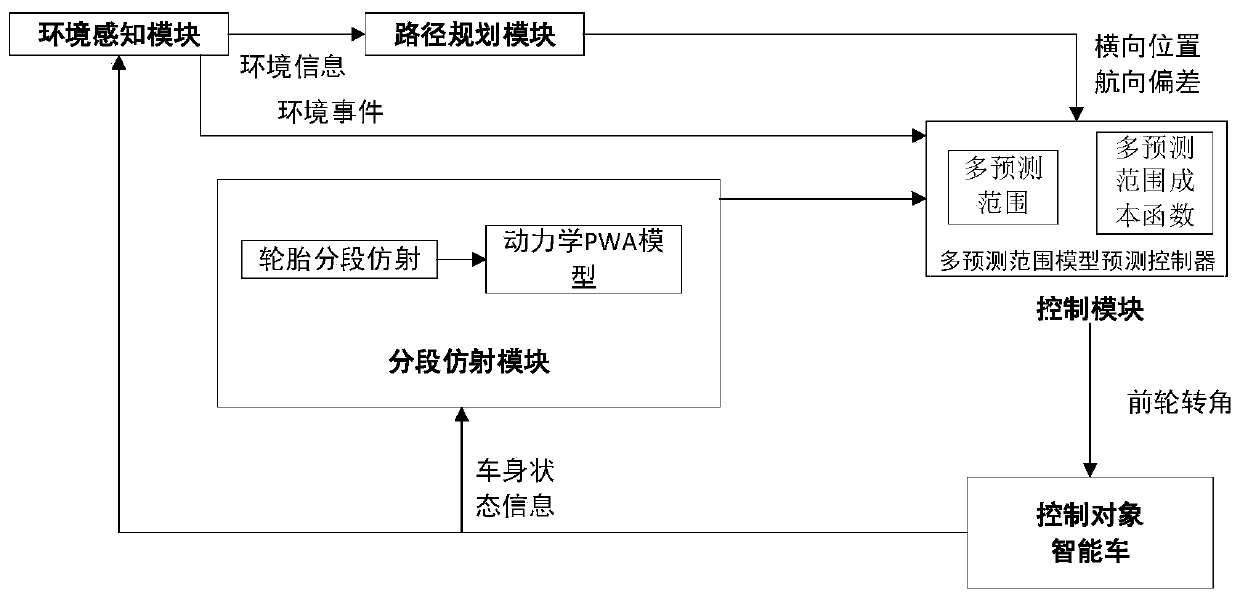
[0014] Such as figure 1 Shown, the composition of the system of the present invention comprises as follows:
[0015] perception module
[0016] Real-time collection of road information ahead of the smart car, yaw rate γ, vehicle speed V x , and the center of mass sideslip angle β. Combined with V2X short-distance perception technology, the traffic road information such as ice and snow weather, roadside pedestrians or sudden stop of the vehicle in front is collected in real time and transmitted to the control module for the controller to pre-judge and call; the cooperation relationship with other modules is as follows: Figure 4 shown.
[0017] path planning module
[0018] Plan an expected path based on the data transmitted by the perception module, this planning path does not include the calculation of complex working conditions;
[0019] Dynamic Modeling Module
[...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More