Intelligent vehicle lane changing track prediction method suitable for man-machine hybrid driving environment
A trajectory prediction, intelligent vehicle technology, applied in prediction, road vehicle traffic control systems, computer parts and other directions, can solve the problems of complex models, inapplicable accuracy, insufficient accuracy, etc., to achieve great practical promotion value, high precision, good automatic The effect of adaptability and robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
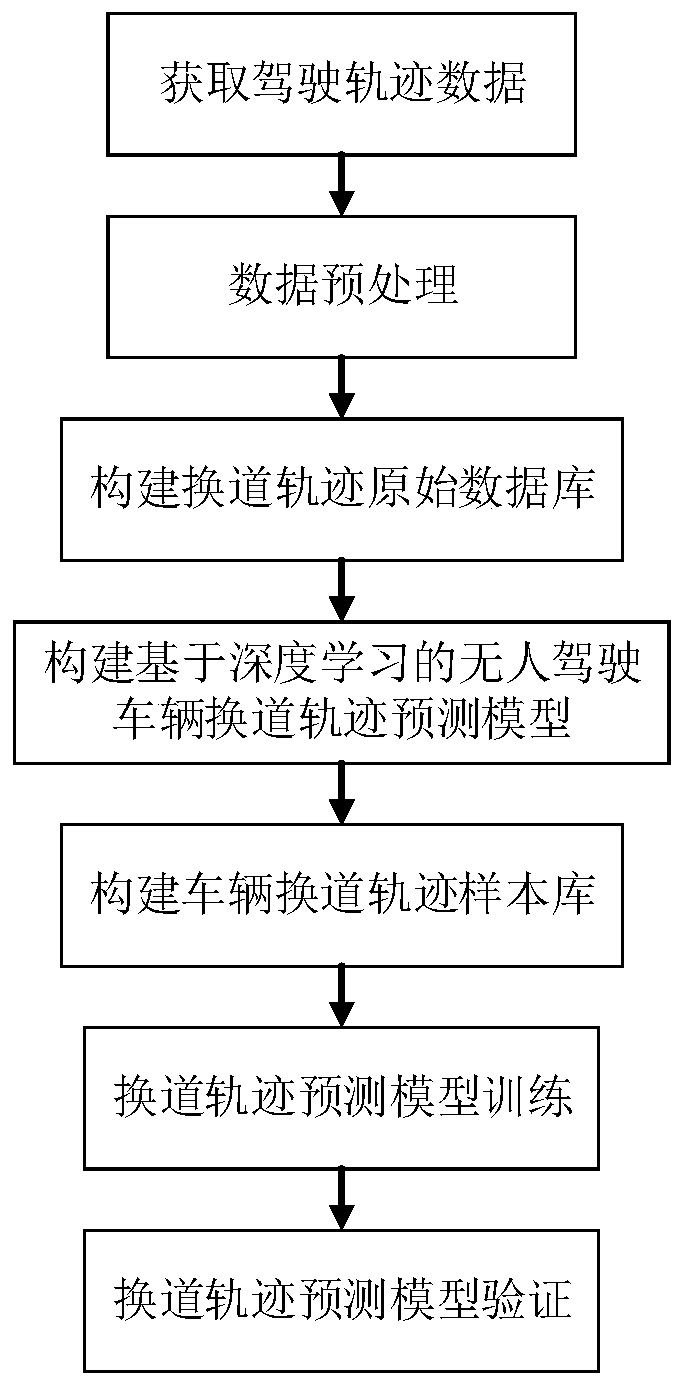
[0052] Such as Figure 1-Figure 3 As shown, a lane-changing trajectory prediction method for intelligent vehicles suitable for human-machine mixed driving environment includes the following steps:
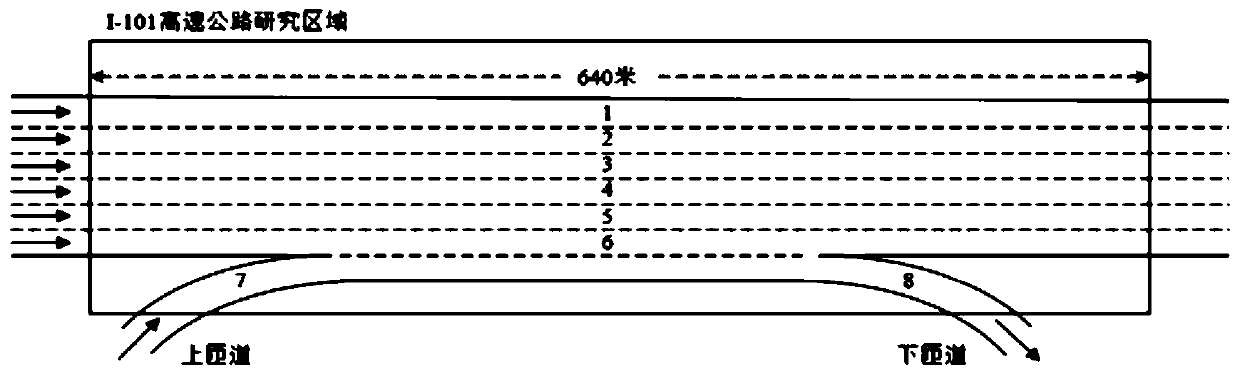
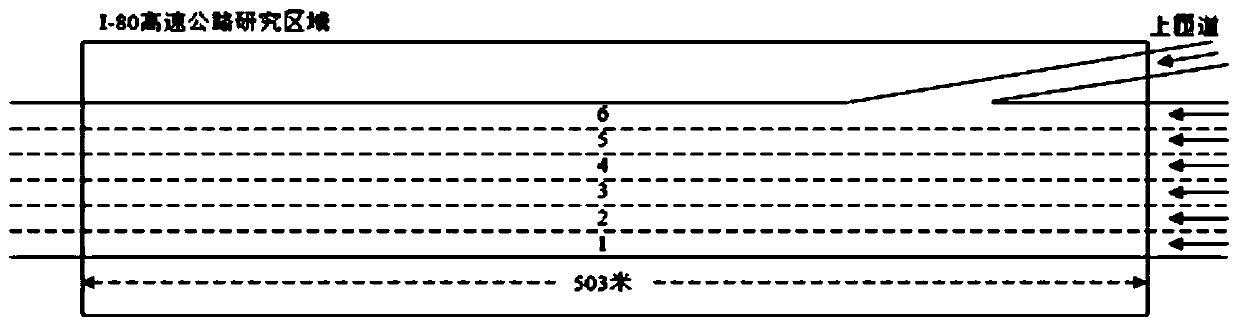
[0053] S1 obtains the trajectory data of the driving driverless car on the highway section;
[0054] S2 processes the acquired driving trajectory data, obtains the vehicle's own spatial information, motion information, and data information of the relative state of adjacent vehicles, and screens out lane-changing data based on the data information to generate a sample database required for the model.
[0055] Firstly, the obtained data is preliminarily screened, vehicle data with missing information is proposed, and the vehicle’s own spatial information, motion information and relative state data of adjacent vehicles are obtained. Lane-changing data is screened out based on the above information, and a sample with a sequence length of N is generated. database.
[0056] The vehicle...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com