

Positioning and mapping method based on millimeter wave radar and visual SLAM
A millimeter-wave radar and vision technology, applied in image analysis, image enhancement, image data processing, etc., can solve the problems of inability to take into account cost, accuracy, robustness, etc., and achieve low distance measurement capability, strong robustness, low cost effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The specific embodiments of the present invention are described below so that those skilled in the art can understand the present invention, but it should be clear that the present invention is not limited to the scope of the specific embodiments. For those of ordinary skill in the art, as long as various changes Within the spirit and scope of the present invention defined and determined by the appended claims, these changes are obvious, and all inventions and creations using the concept of the present invention are included in the protection list.
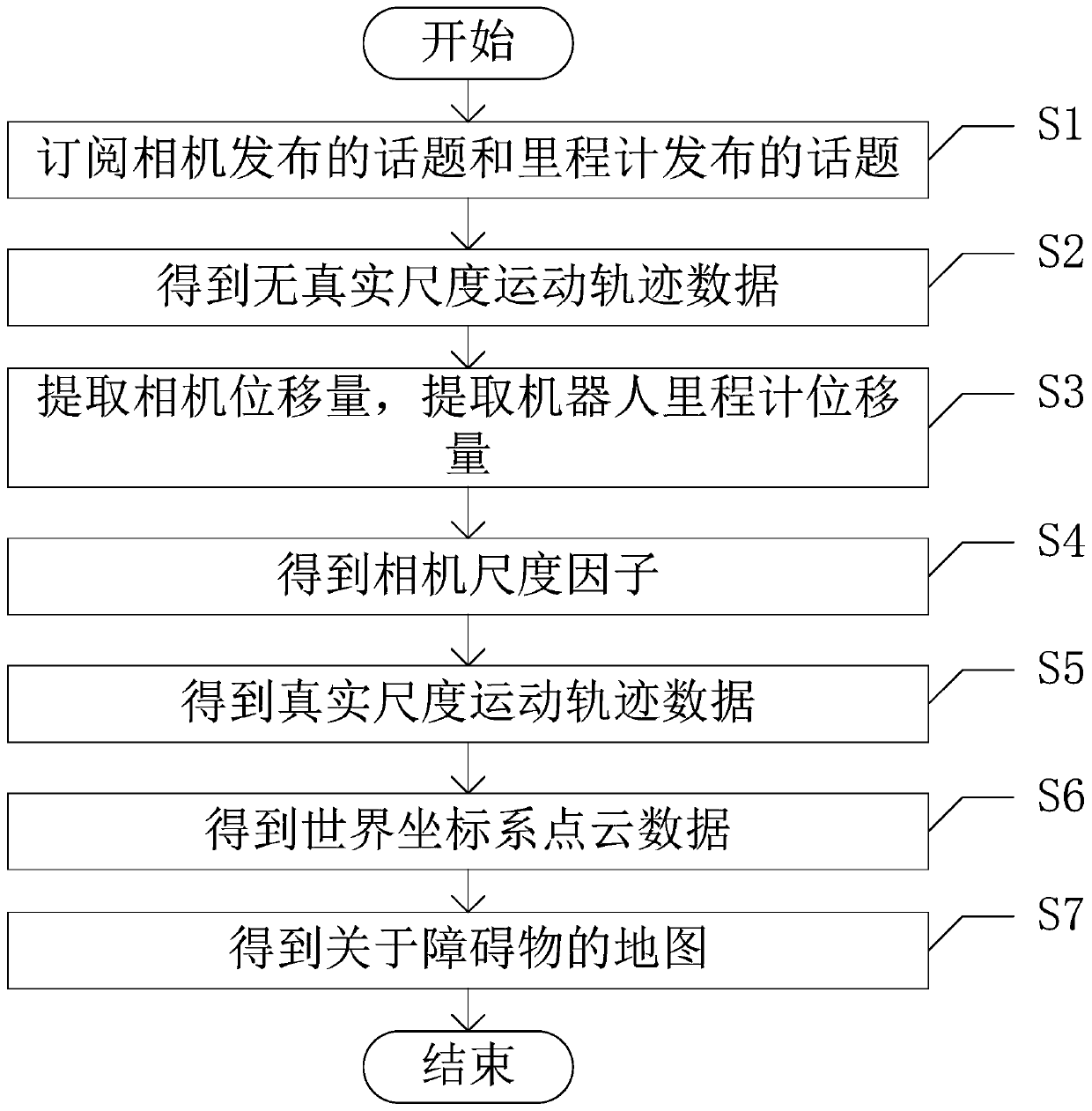
[0036] Such as figure 1 As shown, in one embodiment of the present invention, a kind of positioning and mapping method based on millimeter-wave radar and visual SLAM uses Kinect v2 type camera, turtlebot2 type robot and its built-in odometer and IWR1642BOOST type millimeter-wave radar as hardware platform and follow these steps:
[0037] S1, in ROS (Robot Operating System, robot operating system), subscribe the topic that ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More