

Heavy-load industrial-grade multi-rotor unmanned aerial vehicle hangar
A multi-rotor unmanned aerial vehicle and hangar technology, applied in the field of unmanned aerial vehicles, can solve the problems of incomplete autonomous take-off and landing flight storage tasks, lack of automatic charging tasks, etc., to achieve large carrying capacity, accurate landing recovery, and delaying aging. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
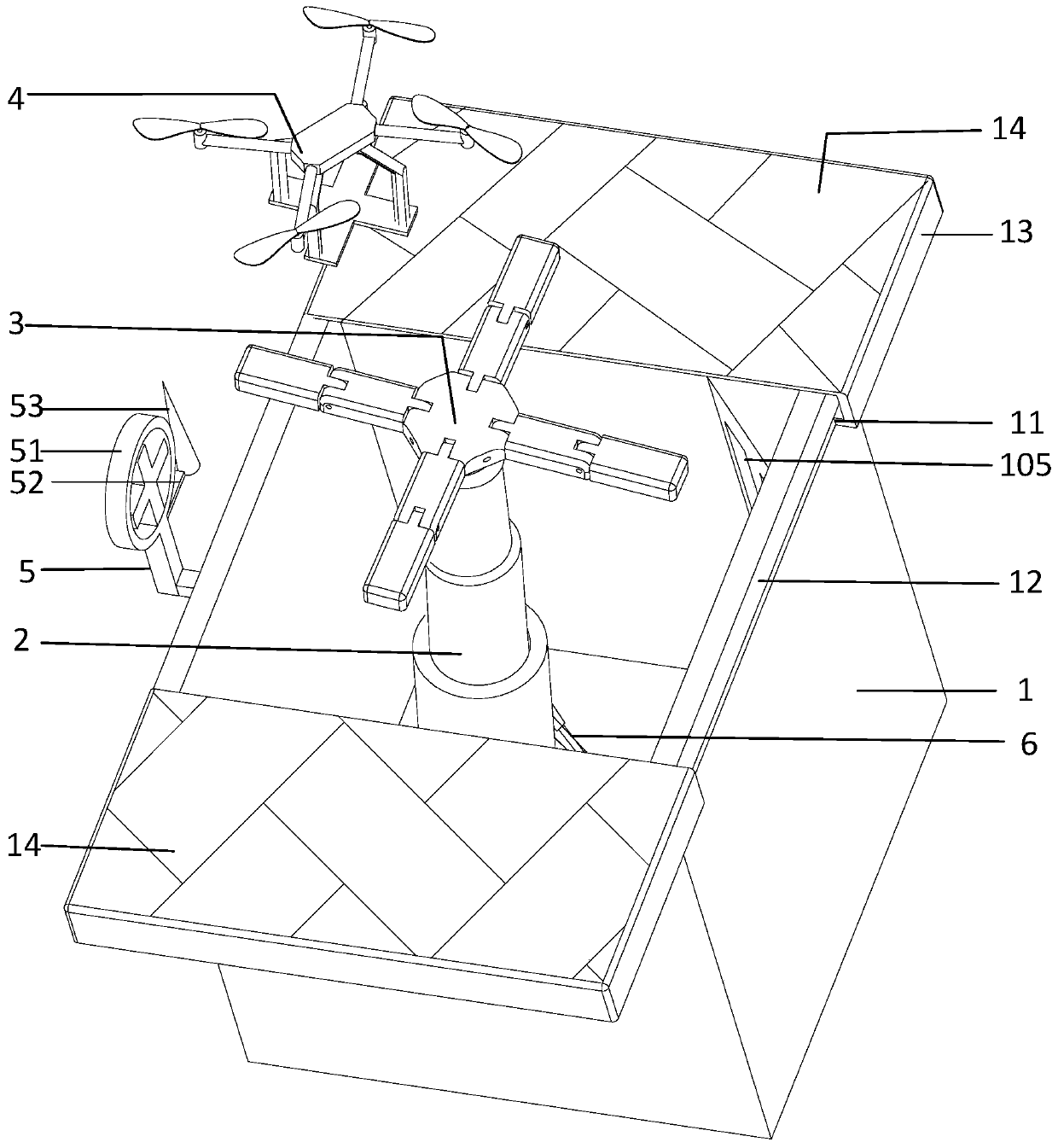
[0027] Such as Figure 1-2 , a heavy-duty industrial-grade multi-rotor UAV hangar, comprising an open hangar 1, a hangar upper cover 13 for closing the open hangar, a solar panel 14, a main mechanical arm 2, a multifunctional manipulator 3, UAV 4, meteorological data acquisition device 5, motion booster 6, comprehensive controller 101 of hangar, power supply device 102, communicator 103, environment controller 104, micro-air conditioner 105, wherein said comprehensive controller 101 and all The micro air conditioner 105, the power supply unit 102, the communicator 103, and the environment controller 104 are electrically connected respectively.
[0028] In this embodiment, the integrated controller 101 is the control center of the unmanned aerial vehicle hangar, which collects information on the working status of each component through the internal electronic circuit, generates control instructions, and controls the coordinated actions of the various actuators to realize the au...
Embodiment 2
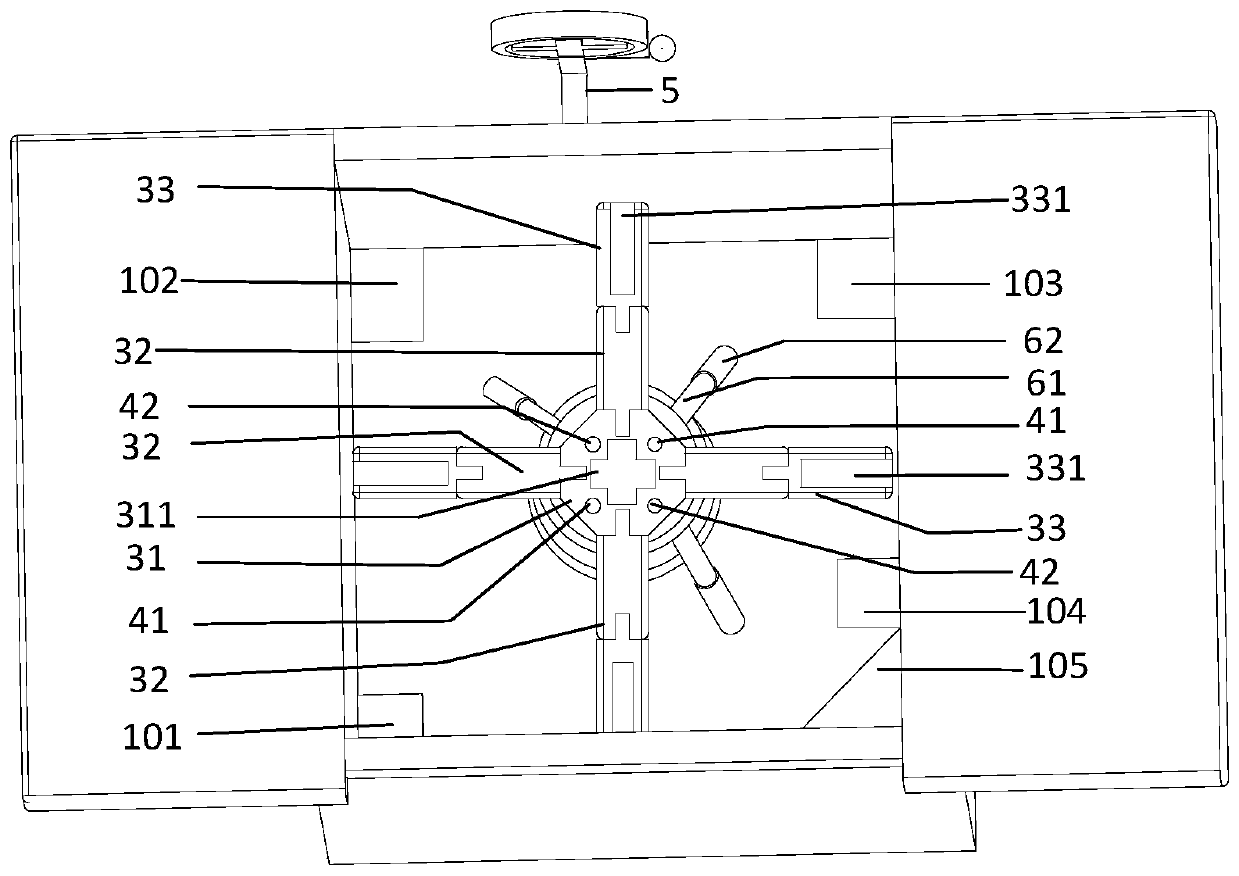
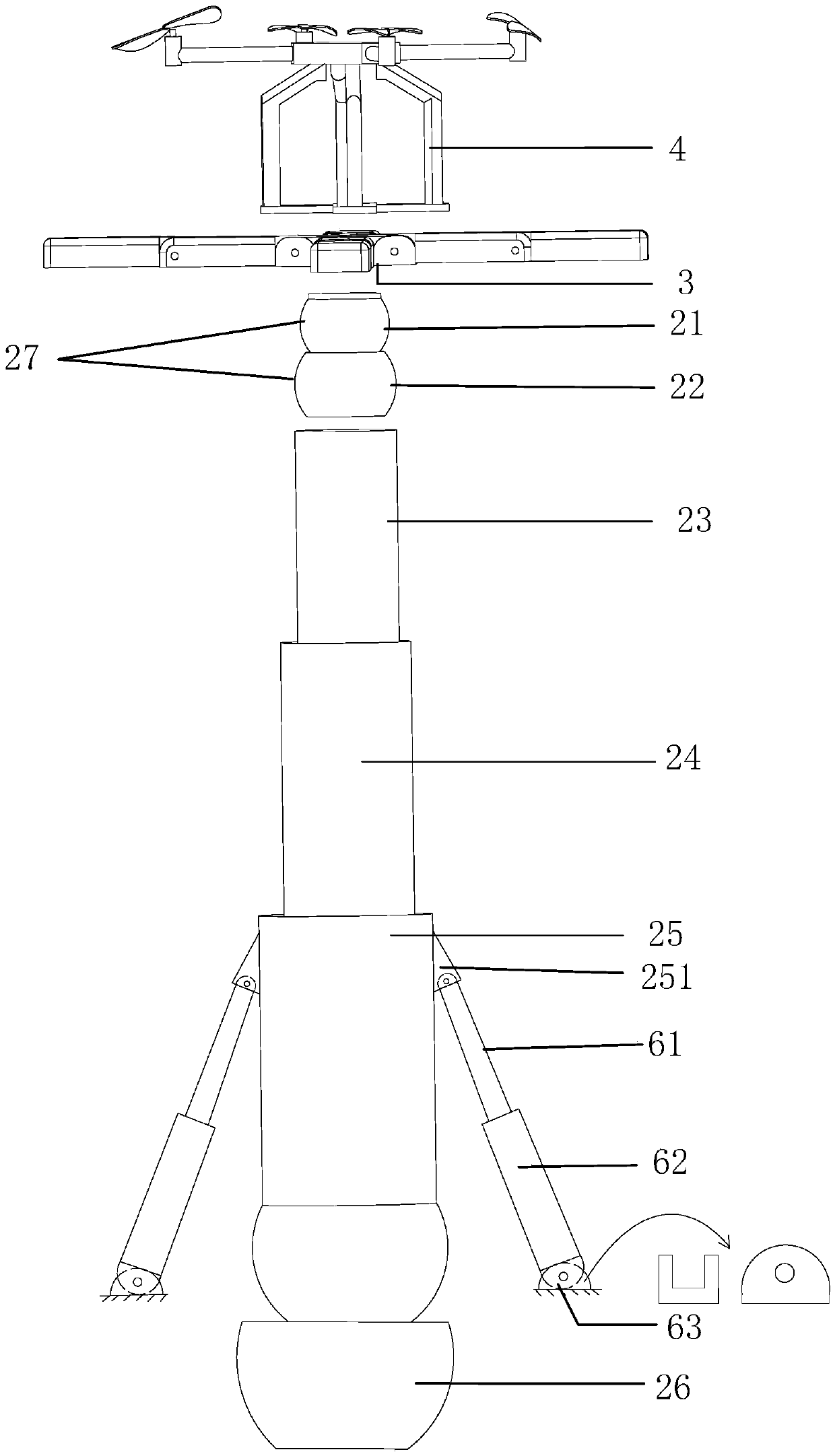
[0040] Such as Figure 1-5 As shown, the present embodiment differs from Embodiment 1 in that the way the UAV lands and locates is different, and the structural design of the platform and the take-off process of the UAV are exactly the same as in Embodiment 1; The difference in implementation example 1 is that after the UAV 4 flies above the multifunctional manipulator 3 through the flight control carried by itself, the image recognition camera 42 on the multifunctional octagonal chassis starts, and the image recognition camera 42 on the undercarriage of the positioning UAV is positioned. Marking point 41, the main mechanical arm 2 adjusts its position under the promotion of the motion booster 6, and the internal electric rotating ball 21 drives the multifunctional manipulator to rotate, so that the image recognition camera 42 and the image recognition mark point on the UAV tripod Corresponding to 41, the integrated controller 101 transmits a descending command to the UAV 4 th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More