Posture estimation method for mobile robot, and terminal equipment
A mobile robot and attitude estimation technology, which is applied in the direction of instruments, measuring devices, surveying and navigation, etc., can solve the problems of high requirements for structural features, high requirements for the surface texture and illumination of the surrounding environment, and achieve accurate estimation results
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0013] In order to enable those skilled in the art to better understand the technical solution of the present invention, the technical solution of the present invention will be further described in detail below in conjunction with the drawings and specific embodiments.
[0014] In order to clearly understand the present invention, the mobile robot will be described below first.
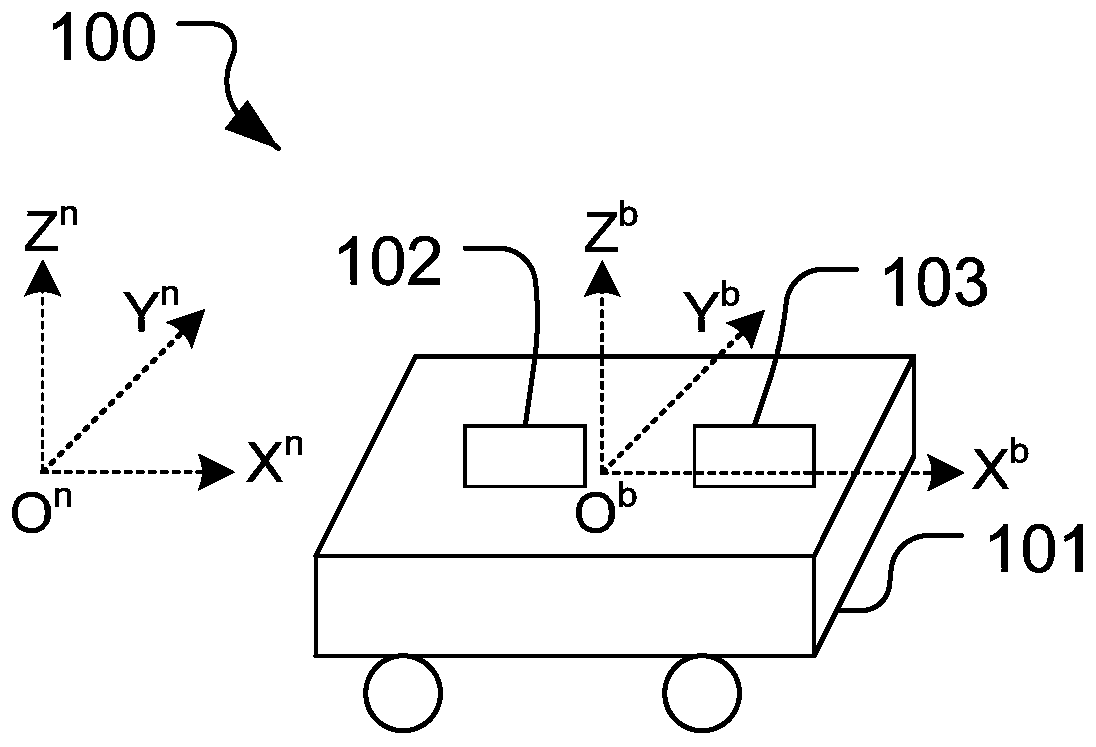
[0015] Such as figure 1 Shown is a schematic structural diagram of a mobile robot according to an embodiment of the present invention, and the mobile robot 100 may include a wheeled robot. The mobile robot 100 includes a vehicle body 101 on which an IMU (Inertial measurement unit, inertial navigation) 102 and an odometry (odometry) 103 are fixedly mounted. IMU 102 includes a three-axis gyroscope and a three-axis accelerometer. The positions of the IMU 102 and the odometer 103 on the vehicle body are subject to actual application, and are not limited here. Since the IMU 102 and the odometer 103 are ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com