

A lightweight multi-joint module for a robot
A multi-joint, robotic technology, applied in the field of robotics, can solve the problems of oversized and inflexible robot arms, and achieve the effects of avoiding electromagnetic influence on the normal operation of equipment, reducing dust, and avoiding condensation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
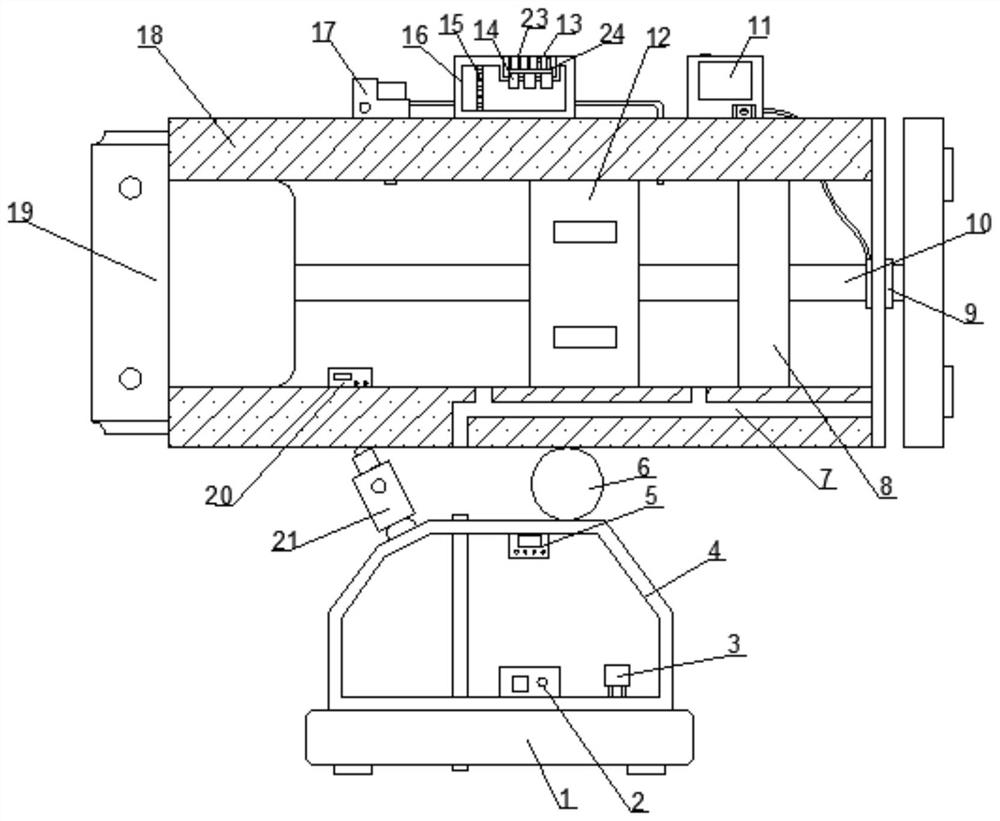
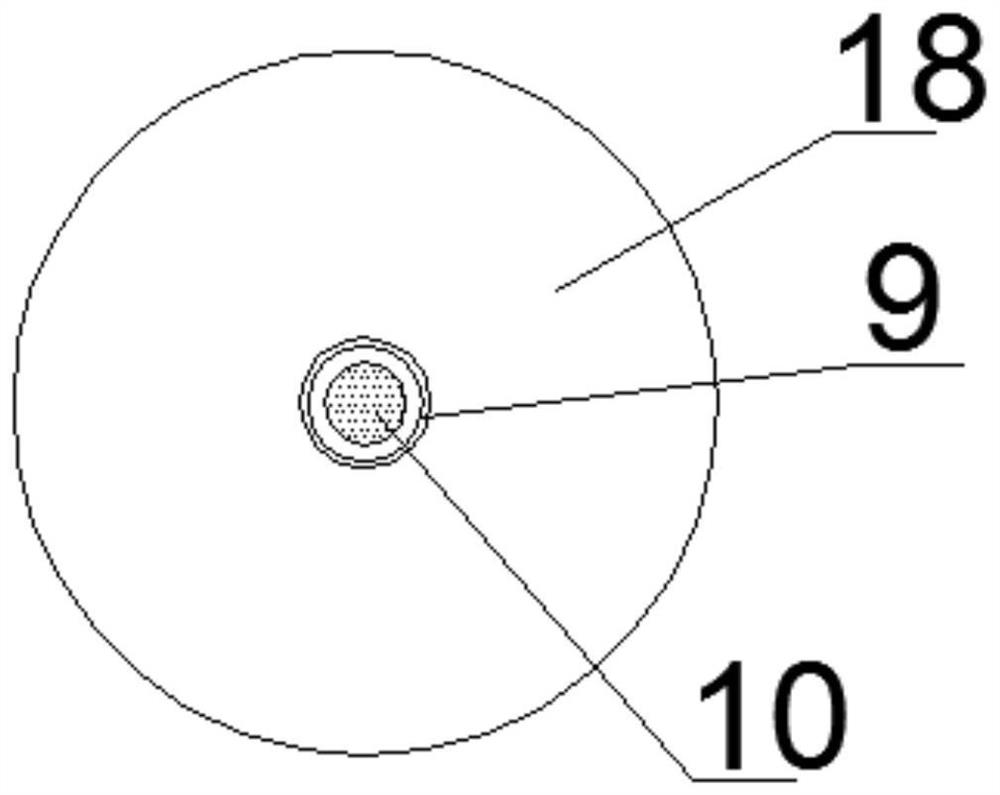
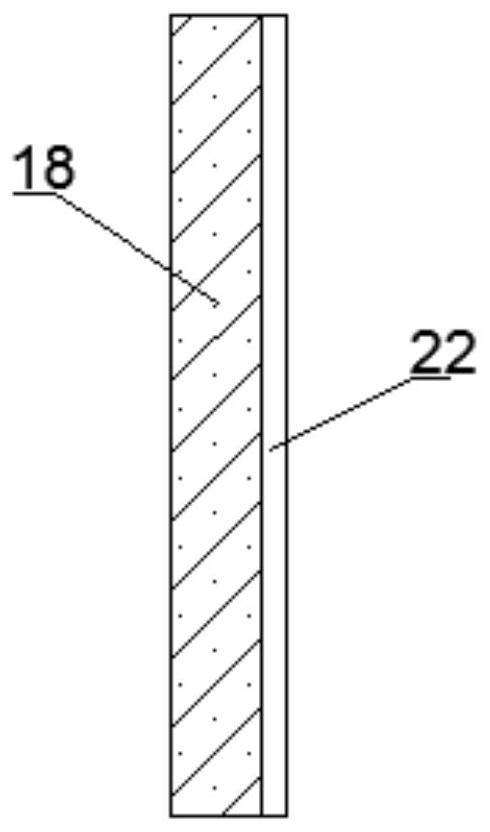
[0032] Such as Figure 1-4 As shown, a lightweight multi-joint module for a robot includes a housing 18, a frameless torque motor 12, and a base 4. The inner bottom of the base 4 is equipped with an overload protector 2 through bolts, and the overload protector 2 is a The side is provided with an anti-electromagnetic interference device 3, the top of the base 4 is installed with a vibration alarm 5 through the installation groove, the top of the base 4 is connected to the housing 18 through the rotating shaft 6, and the inside of the housing 18 is connected to A frameless torque motor 12 is installed, one side of the frameless torque motor 12 is provided with a brake 8, and the other side of the frameless torque motor 12 is equipped with a harmonic reducer 19 through a mounting frame, and the frameless torque motor The motor 12 is provided with a main shaft 10 through, a shaft sleeve 9 is provided on one side of the housing 18, a refrigeration box 16 is provided on the top of ...
Embodiment 2
[0053] Such as Figure 1-4 As shown, a lightweight multi-joint module for a robot includes a housing 18, a frameless torque motor 12, and a base 4. The inner bottom of the base 4 is equipped with an overload protector 2 through bolts, and the overload protector 2 is a The side is provided with an anti-electromagnetic interference device 3, the top of the base 4 is installed with a vibration alarm 5 through the installation groove, the top of the base 4 is connected to the housing 18 through the rotating shaft 6, and the inside of the housing 18 is connected to A frameless torque motor 12 is installed, one side of the frameless torque motor 12 is provided with a brake 8, and the other side of the frameless torque motor 12 is equipped with a harmonic reducer 19 through a mounting frame, and the frameless torque motor The motor 12 is provided with a main shaft 10 through, a shaft sleeve 9 is provided on one side of the housing 18, a refrigeration box 16 is provided on the top of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More