

Electronic differential control method and system of four-wheel drive electric vehicle
An electronic differential control, electric vehicle technology, applied in electric vehicles, drive interaction, control drive, etc., can solve the problems of inability to perform fast and accurate torque control, inability to apply to electric vehicles, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
[0083] The preferred embodiments of the present invention will be further described below in conjunction with the accompanying drawings.
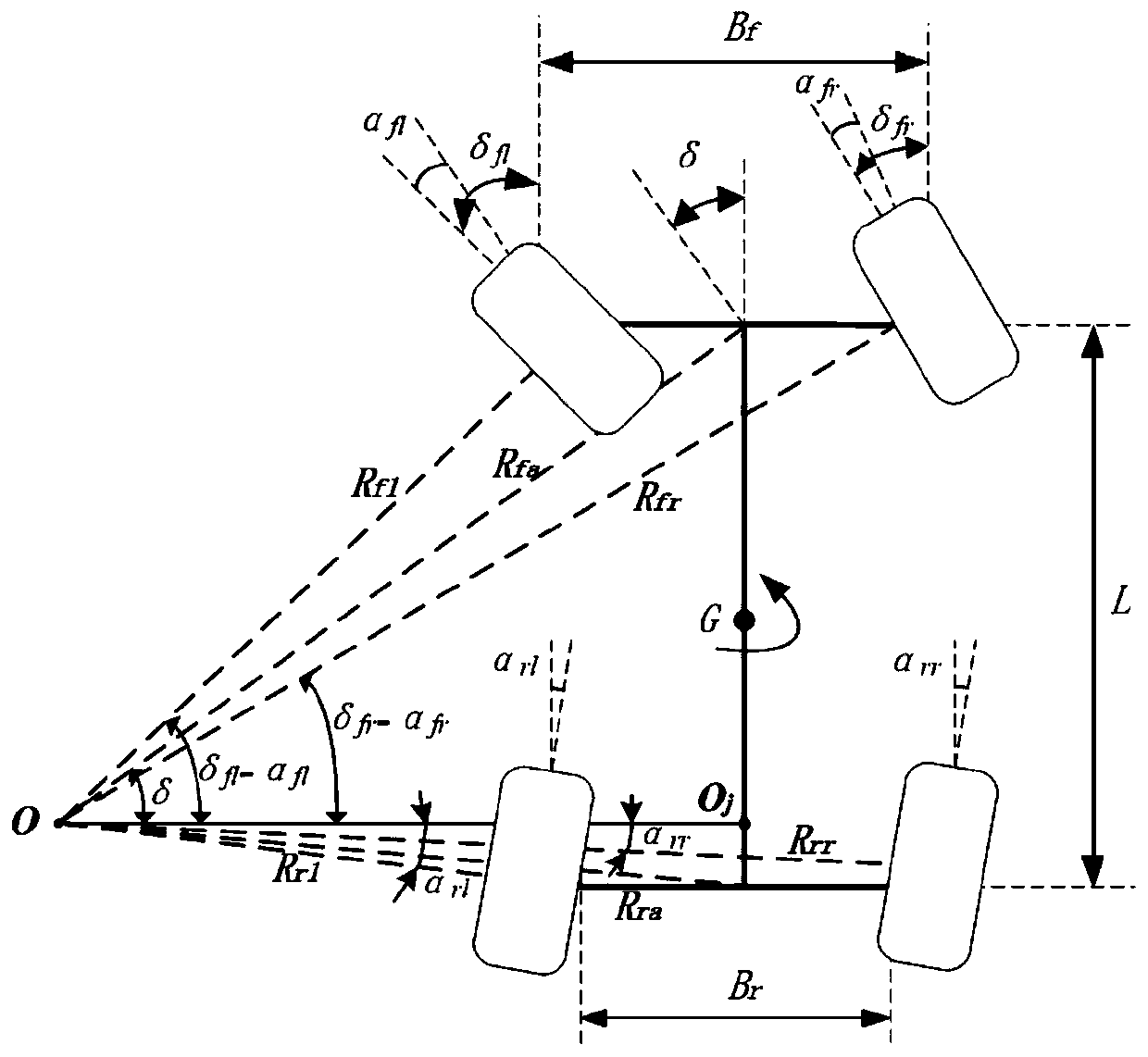
[0084] The electronic differential speed control method for a four-wheel drive electric vehicle of the present invention is suitable for a four-wheel drive electric vehicle. Since the left and right steering of the vehicle is symmetrical, the present invention takes the left steering as an example for illustration, and the right steering refers to the left steering for differential speed control. , and the calculation of parameters is stipulated. During the measurement and calibration process, the left steering is a negative sign, and the right steering is a positive sign. vehicle model such as figure 1 As shown, in order to realize the differential speed function of four-wheel drive hub motor, the main technical solutions of the present invention are now set forth as follows:
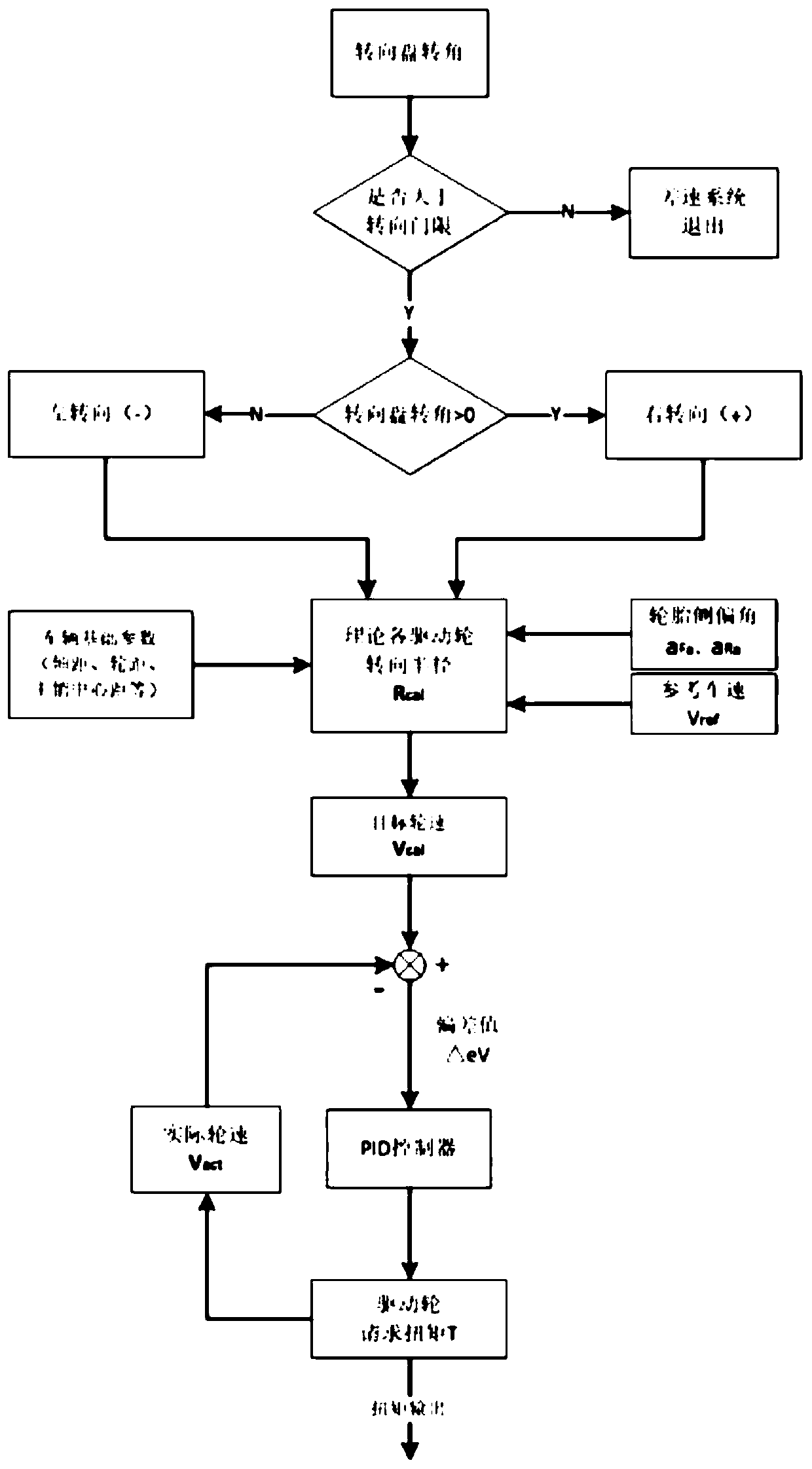
[0085] Such as figure 2 As shown, the electronic accelerato...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More