

Eight-degree-of-freedom surgery mechanical arm comprising closed-loop connecting rod
A technology of degrees of freedom and mechanical arms, applied in the field of surgical robots, can solve the problems that traditional surgical robots cannot have telecentric features, cannot be used well, and are difficult to process and manufacture, and achieve a simple and flexible structure, convenient and flexible driving, and a compact structure. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0010] In order to make the purpose, technical solution and advantages of the present invention clearer, the embodiments of the present invention will be further described below in conjunction with the accompanying drawings.
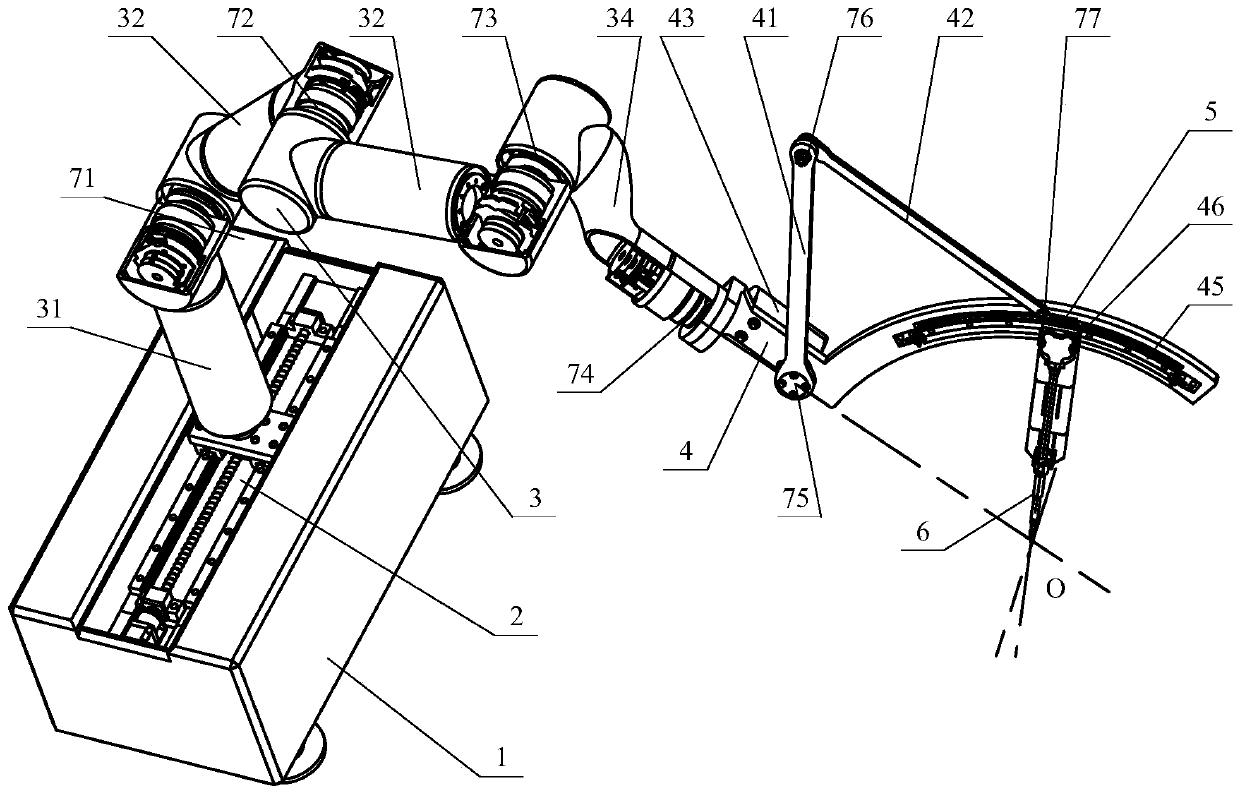
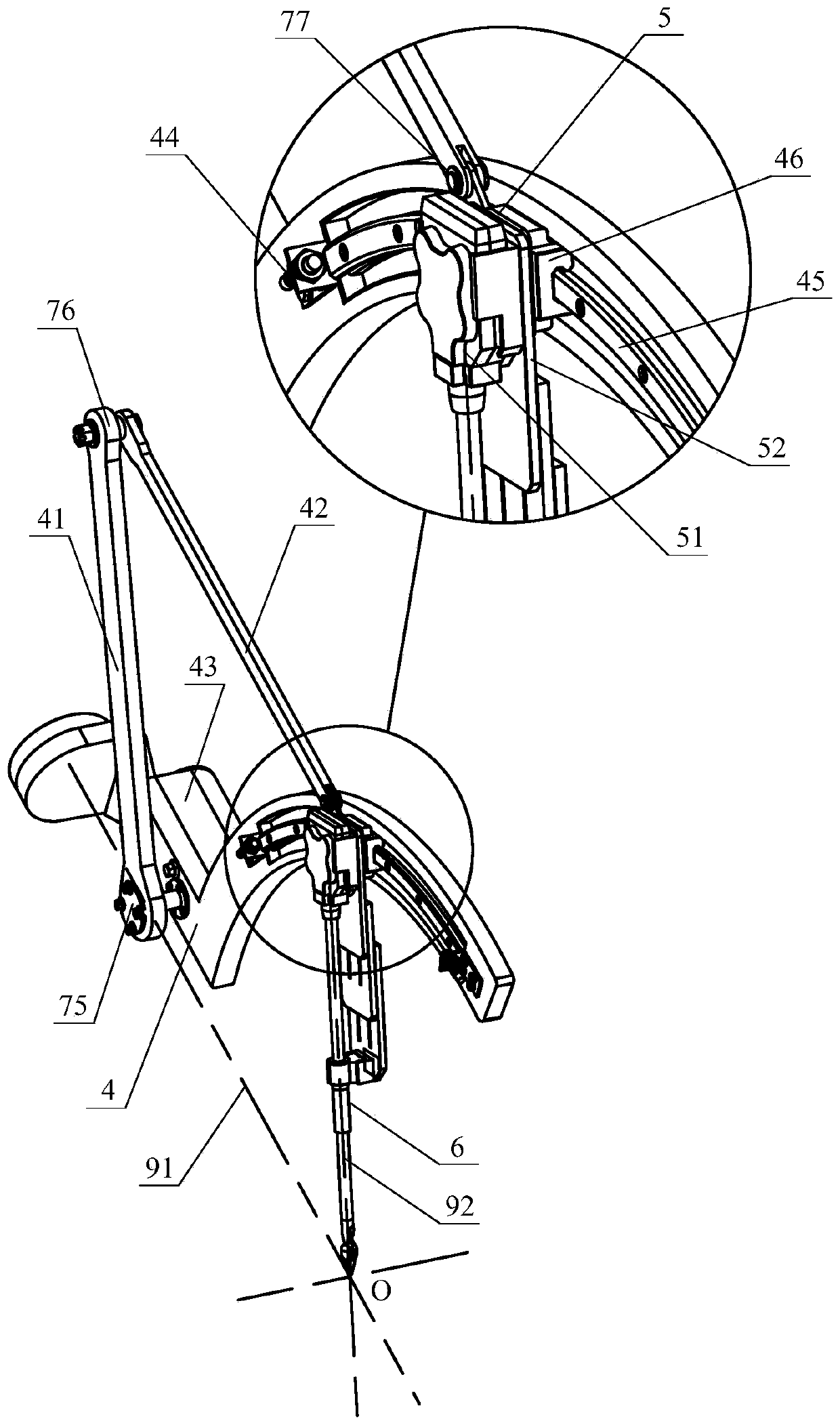
[0011] Such as figure 1 and image 3 As shown, an eight-degree-of-freedom surgical robot arm containing a closed-loop link includes a position adjustment assembly, an attitude adjustment assembly, and a surgical instrument 6; the surgical instrument 6 includes but is not limited to a scalpel; the attitude adjustment assembly includes a base 1. The linear slide rail assembly 2 and the articulated arm 3, the linear slide rail assembly 2 is arranged on the base 1, and the posture adjustment assembly includes an arc plate 4, a driving rod 41, a driven rod 42 and an arc-shaped components on the board.
[0012] The articulated arm includes a first connecting arm 31, a second connecting arm 32, a third connecting arm 33 and a fourth connecting arm 34, and the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More