

Online planet landing trajectory optimization method based on non-uniform expansion ellipsoid
An optimization method and ellipsoid technology, applied in the field of deep space exploration, can solve problems such as position and velocity estimation errors, and achieve the effect of improving the avoidance ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
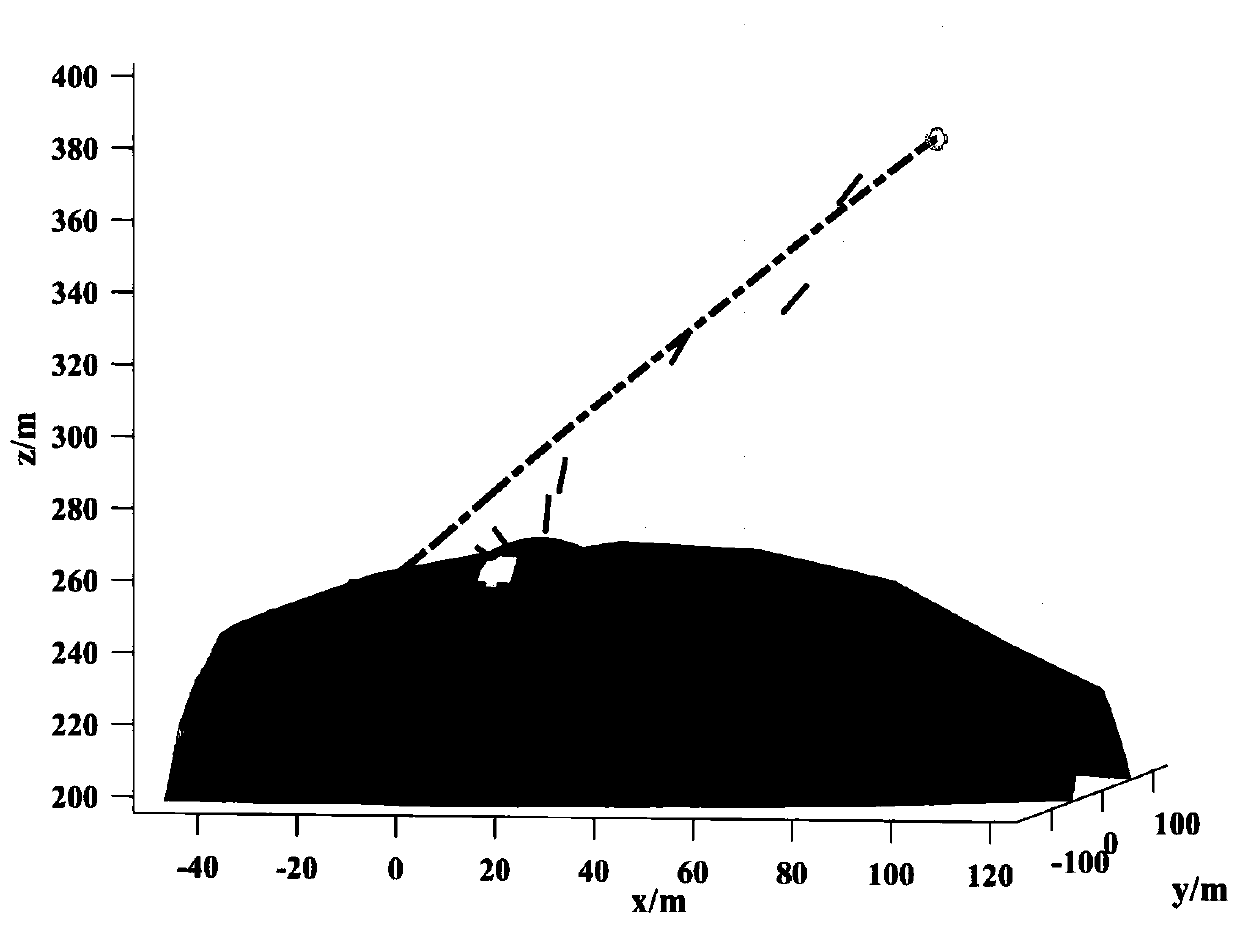
[0056] In order to verify the feasibility of the method, an asteroid landing dynamics model is established based on the target celestial body Bennu of the NASA OSIRIS-REx mission, and the asteroid rotation angular velocity is ω=4.0679×10 -4 rad / s, density ρ=1.26×10 3 kg / m 3 , gravitational constant G=6.67×10 -11 N m 2 / kg 2 . In the fixed coordinate system on the surface of the asteroid, the initial position of the detector r 0 =[100,-80,380] T m, the initial velocity v 0 =[-1,0,0] T m / s, target landing point position r f =[-26,0,243] T m, the ideal terminal velocity v f =[0,0,0] T m / s.
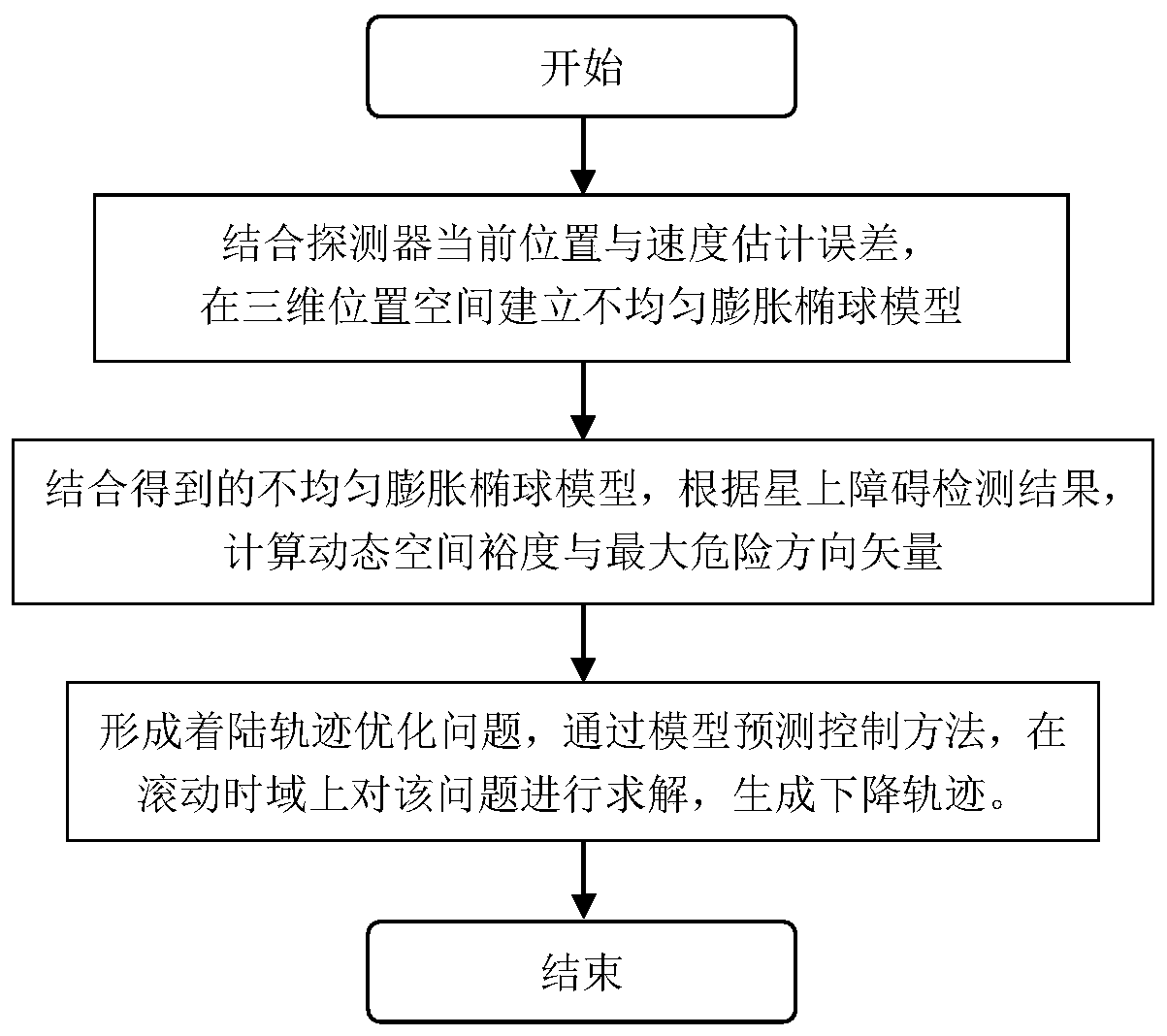
[0057] Such as figure 1 As shown, the method for online optimization of planetary landing trajectory based on non-uniform expansion ellipsoid disclosed in this embodiment includes the following steps:
[0058] Step 1. Combining the detector's current position and velocity estimation errors, an inhomogeneous expansion ellipsoid model is established in the position space.
[0059...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More