

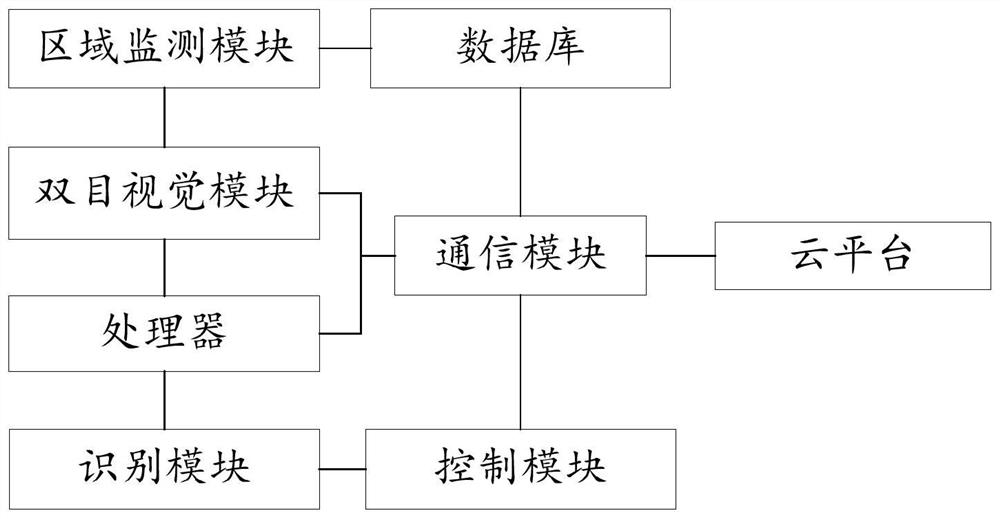
Forklift anti-collision system based on binocular vision
A binocular vision, collision avoidance system technology, applied in scene recognition, combustion engine, internal combustion piston engine and other directions, to achieve the effect of all-round power consumption, all-round recognition and ranging, low recognition and ranging
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0085] If the feature analysis set includes the first type of instruction and the feature state set includes the second distance instruction, a first control signal is generated, and the moving direction of the forklift is adjusted through a preset first adjustment angle according to the first control signal to avoid object obstacles;
[0086] If the feature analysis set contains the first type of instruction and the feature state set contains the third distance instruction, a second control signal is generated, and the moving direction of the forklift is adjusted through a preset second adjustment angle according to the second control signal to avoid object obstacles; Wherein, the second adjustment angle is greater than the first adjustment angle;
[0087] The specific steps for adjusting the moving direction of the forklift according to different adjustment angles include:
[0088] Obtain the monitoring coordinates of obstacles on the three-dimensional coordinate system esta...
Embodiment 2
[0094] If the feature analysis set contains the second type of command and the feature state set contains the first distance command, a third control signal is generated, and the forklift is controlled to decelerate according to the third control signal and the bell will prompt;
[0095] If the feature analysis set contains the second type command and the feature state set contains the second distance command, a fourth control signal is generated, and the forklift is controlled to stop moving according to the fourth control signal and a voice prompt is performed to avoid obstacles.
[0096] It should be noted that this embodiment can adaptively make different operation controls according to the type and distance of the obstacle. When the obstacle is an object, different degrees of offset are made according to the distance and position between the forklift and the object. to actively avoid the object; when the obstacle is a person, different prompts are made according to the dis...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More