

Visual navigation inspection and obstacle avoidance method for line patrol robot
A line inspection robot and visual navigation technology, applied in the field of line inspection robots, can solve problems such as difficult obstacle-surmounting strategies of inspection systems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
[0035] The invention provides a visual navigation inspection and obstacle avoidance method for a line inspection robot. The line inspection robot is equipped with a motion control system, a visual navigation system and an inspection vision system, and both the motion control system and the visual navigation system establish communication with the inspection vision system connect;
[0036] The method includes the following steps:
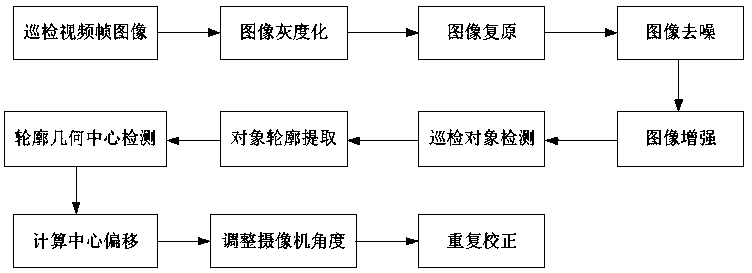
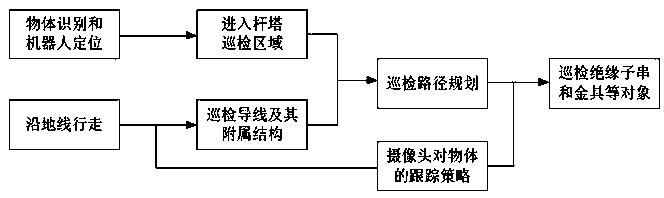
[0037] (1) The inspection camera of the inspection vision system collects inspection images in real time, judges and identifies the type of tower according to the inspection image, inspects the wires between the towers and their auxiliary structures, and inspects the insulator strings and the fittings of the tower. The types of towers include straight towers and tension towers. The wires an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More