

Improved nonlinear optimization method of monocular inertial navigation SLAM
A nonlinear optimization, single-purpose technology, applied in the direction of navigation, navigation, mapping and navigation through velocity/acceleration measurement, can solve the problems of IMU pre-integration, nonlinear optimization, sensor time synchronization, etc., to achieve good scale factor, accuracy and robustness improvement, the effect of solving the scale uncertainty problem
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0025] The present invention will be further described below in combination with specific embodiments and accompanying drawings.
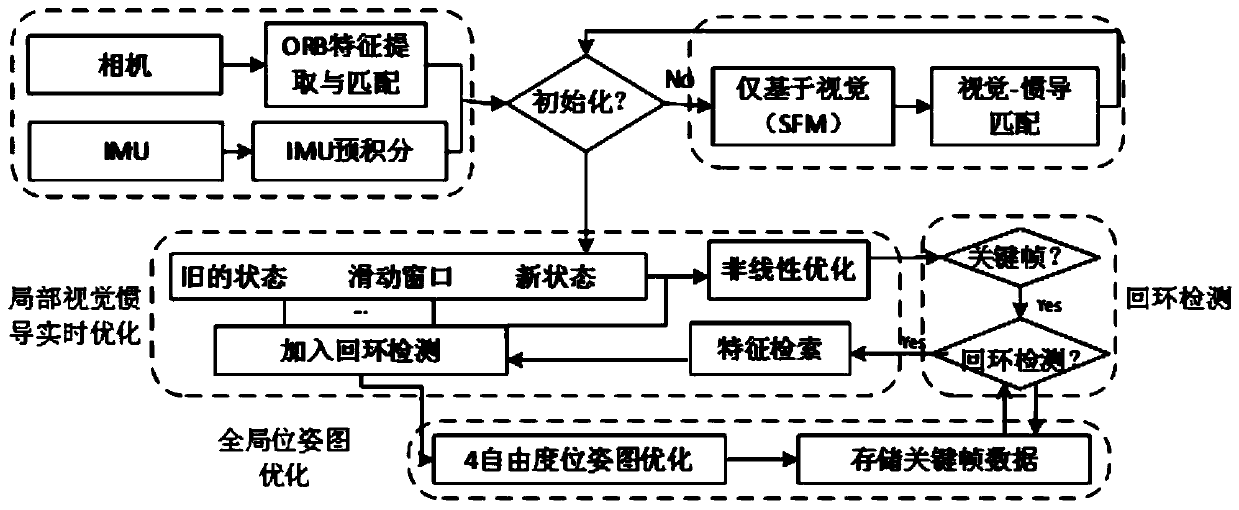
[0026] Aiming at the current pure visual SLAM (Simultaneous Localization and Mapping) system is easily affected by scenes such as ambient lighting, texture, and dynamic environment, and the monocular SLAM system also has the problem of blurred initialization scale, the present invention uses a monocular camera and an IMU ( Inertial Measurement Unit) fusion method effectively solves the scale ambiguity problem existing in the monocular SLAM system, and the fusion of these two sensors significantly improves the robustness of the system and can obtain higher positioning accuracy. The present invention is based on the VINS-mono system with the best monocular vision and IMU fusion performance at present, improves the initialization scheme, increases the initialization of the acceleration bias deviation, and makes it suitable for low-cost IMU sensors. Th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More