

Visual SLAM method based on instance segmentation
A visual and visual image technology, applied in the field of visual images, can solve the problems of low positioning accuracy, inability to generate semantic maps, poor robustness of pose estimation, etc., and achieve the effect of improving accuracy, improving accuracy and computing efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0037] The technical solution of the present invention is described in conjunction with the embodiments.
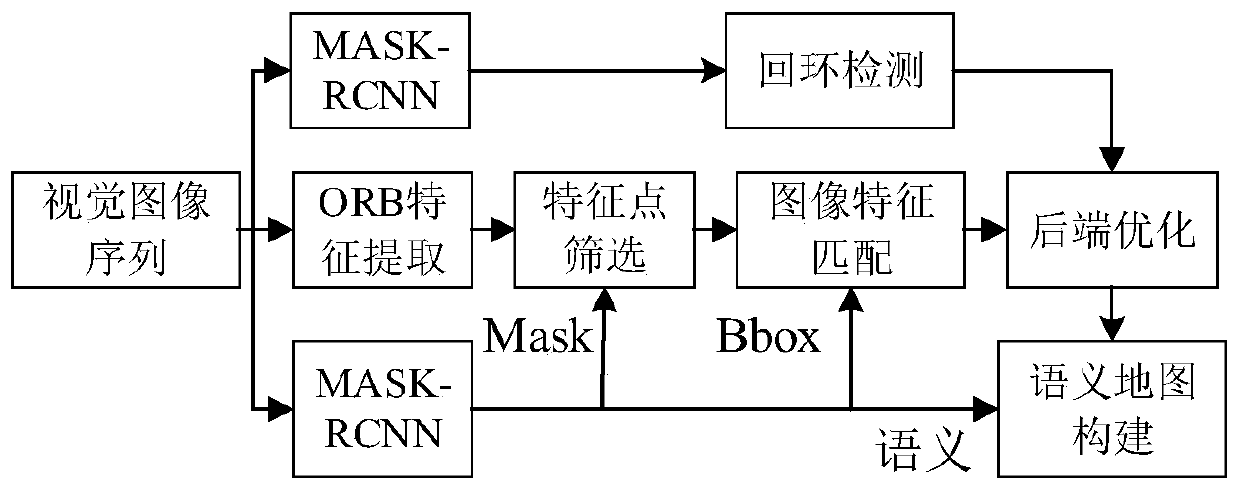
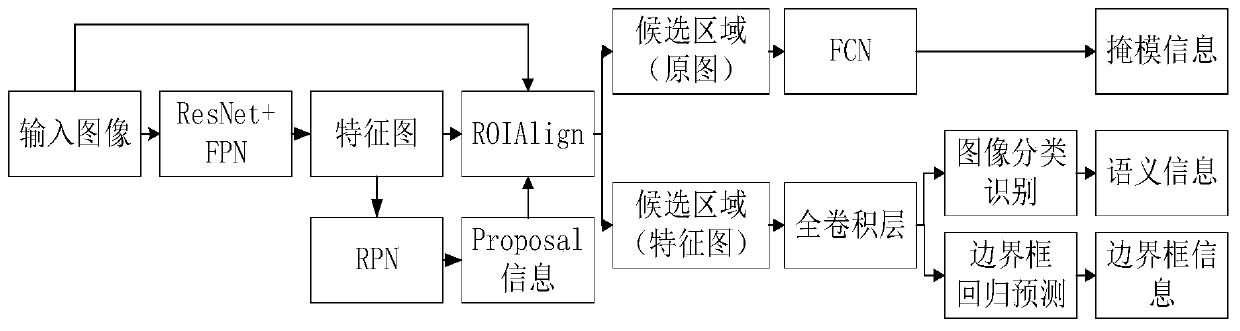
[0038] The present invention is mainly divided into two modules, namely a positioning and composition module and an instance segmentation module. Among them, the instance segmentation module is mainly responsible for target detection and semantic information extraction of visual image sequences, providing constraint information for the positioning and composition module, improving positioning accuracy and positioning efficiency, and providing semantic information for composition.
[0039] Concrete process scheme of the present invention is as figure 1 shown.
[0040] The specific process of the program is as follows:
[0041](1) Extract ORB feature points from the visual image collected by the depth camera. Image feature points are points that are analyzed by algorithms and contain rich local information. The present invention uses the ORB (Oriented FAST and Rotated BR...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More