

Vehicle following behavior prediction method under Apollo platform
A car-following and prediction method technology, which is applied in the field of car-following behavior, can solve the problems of lack of driving environment considerations, only considering the leading car and car-following car, fuzzy theory, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0069] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
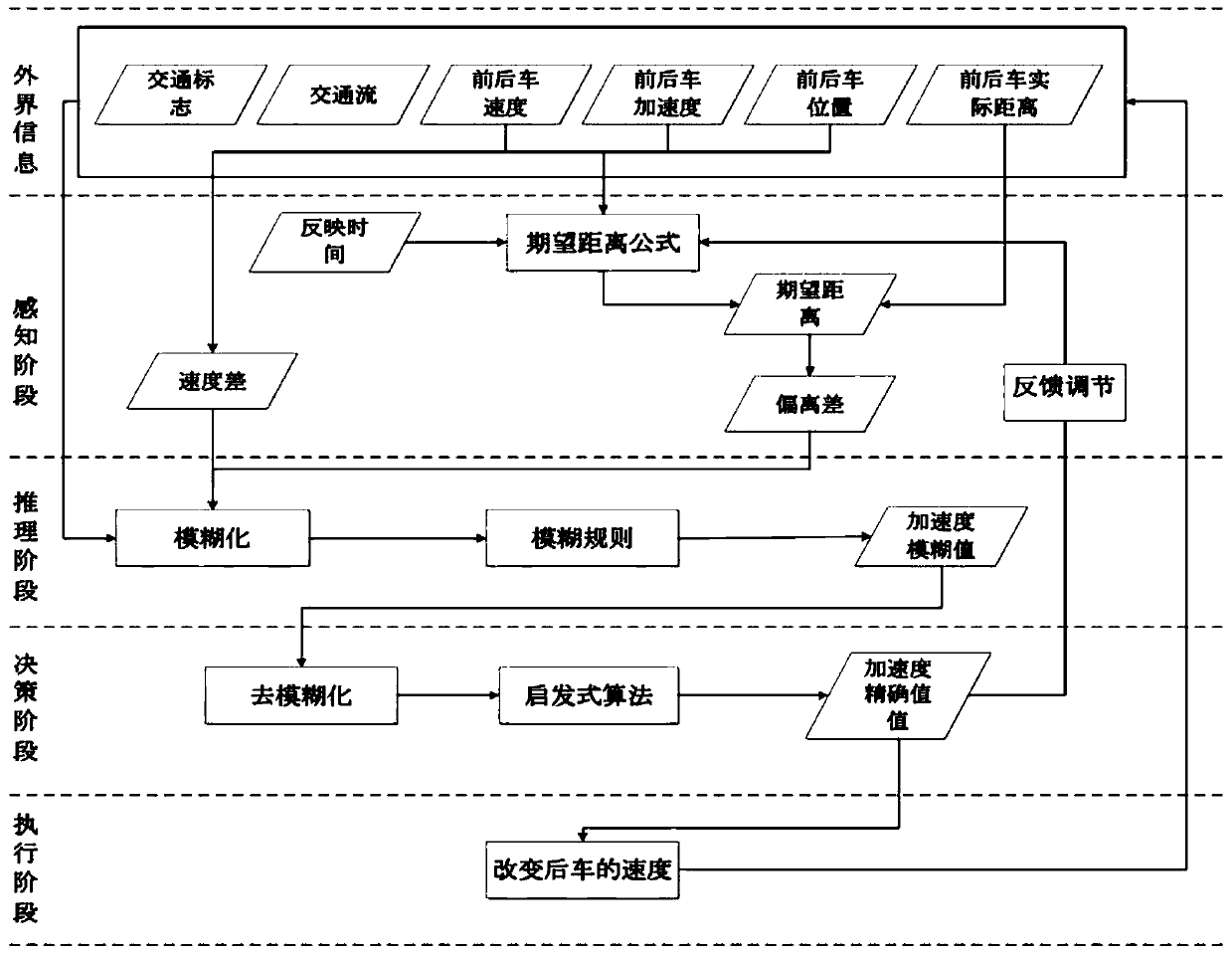
[0070] The car-following behavior prediction method under the Apollo platform of the present invention, firstly, a structured description of the scene is formed through scene understanding, the constraints of the vehicle motion geometry and the physical level are given, and the traffic signs, marking lines, and the relationship between the traffic sign and the surrounding vehicles Environmental information such as relationships is input into Dreamview of the Apollo platform to construct a real road scene; then, the driving behavior of the following car driver is divided into four stages: perception stage, reasoning stage, decision-making stage, and execution stage. The perception stage is to process the obtained external information, and calculate the expected distance and speed difference of the following car driver at the current moment; the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More