

Robot path planning method based on combination of visibility graph method and greedy algorithm
A greedy algorithm and path planning technology, applied to instruments, road network navigators, measuring devices, etc., can solve problems such as complex modeling, numerous paths, and low computational efficiency, so as to reduce complexity, avoid collisions, and improve computational efficiency Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
example 1
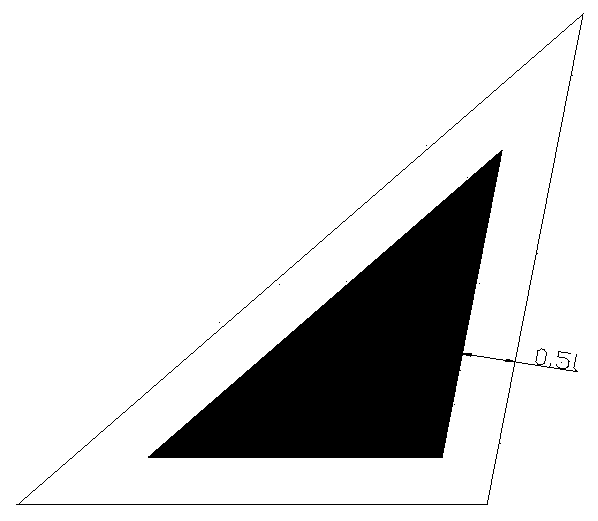
[0026] Example 1: A robot path planning based on the combination of visual graph and greedy algorithm. Firstly, the obstacles are regularized into polygons, and then the polygons are enveloped with an offset of 0.5l, and finally the outer contour of the polygons is obtained.
[0027] Such as Figure 1 to Figure 5 As shown, the path planning method includes the following steps:
[0028] S1 Determine the origin and establish a rectangular coordinate system
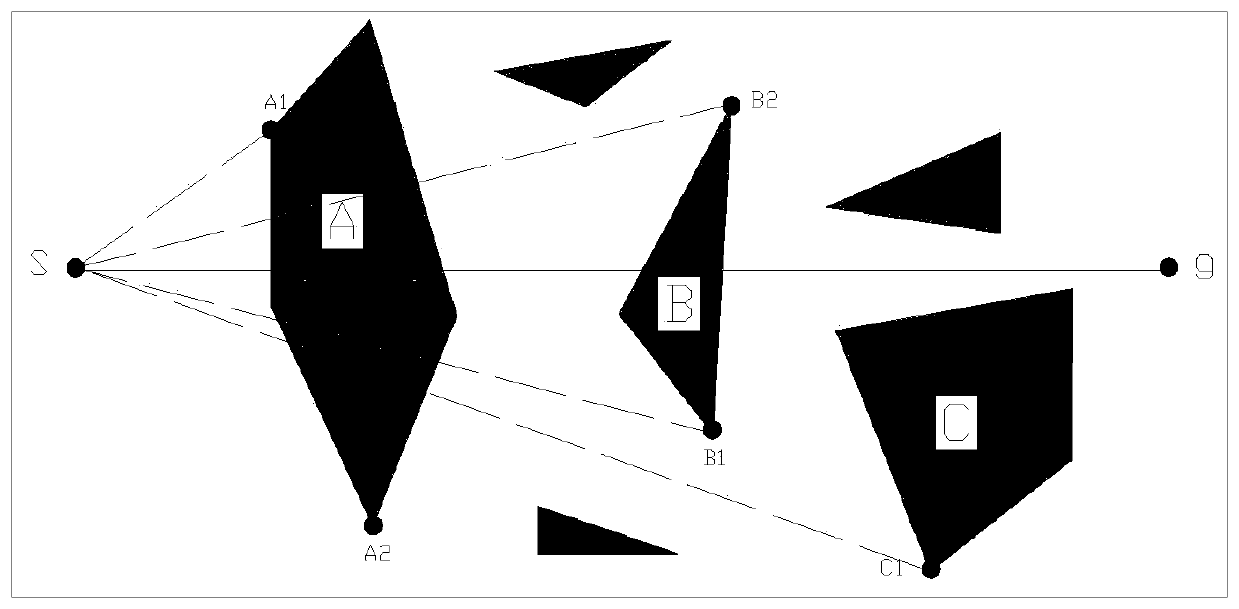
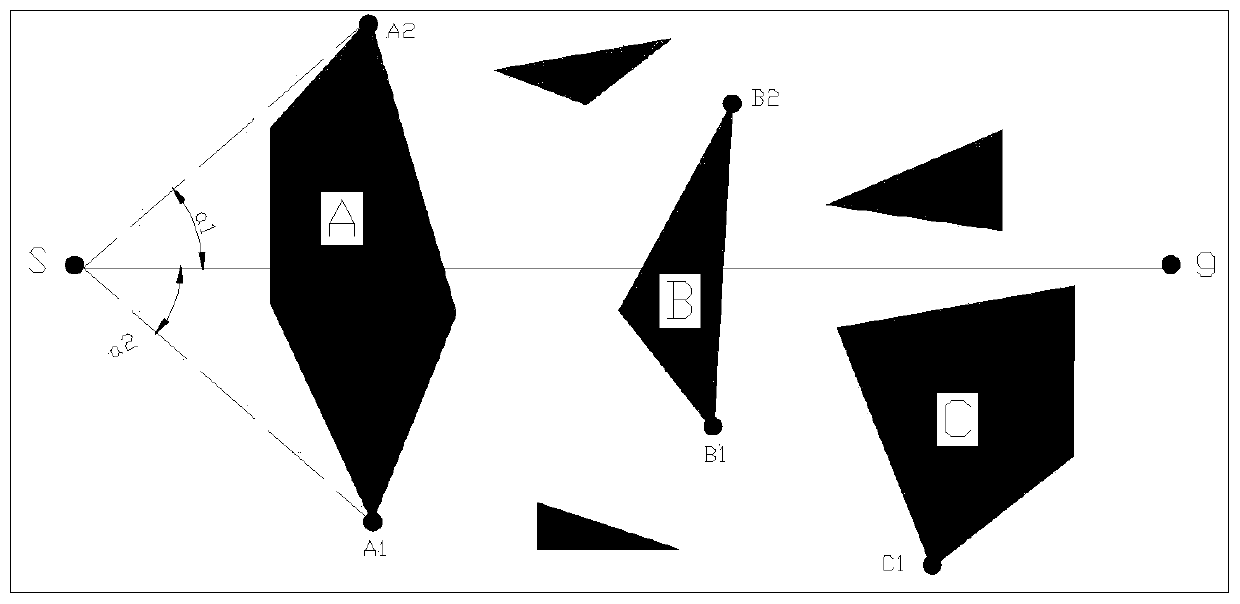
[0029] Determine the starting point s and the target point g, take the starting point s as the origin of the coordinates, and the connection line between the starting point s and the target point g is the x-axis to construct a Cartesian coordinate system, and record the vertex coordinates of each polygon.
[0030] S2 divides set S and set V
[0031] Connect the starting point s and the target point g to get the auxiliary line l 1 . Auxiliary line l 1 will pass through multiple obstacle polygons (such as figure 2 As sh...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More