

An Adaptive Alignment Method in Earth Fixed Coordinate System
A coordinate system and adaptive technology, applied in the field of inertial navigation, can solve the problems of reducing the amount of real-time calculation and large amount of real-time calculation, and achieve the effect of reducing the amount of real-time calculation, small amount of real-time calculation and saving time.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0041] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
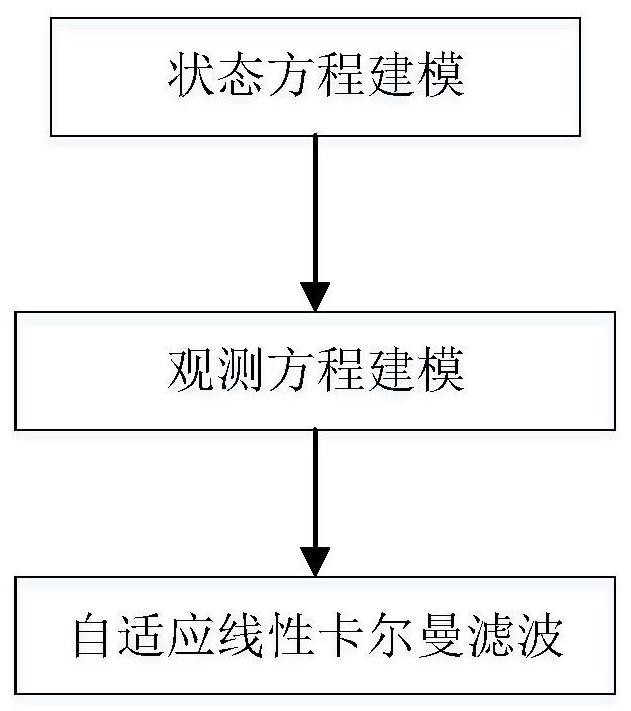
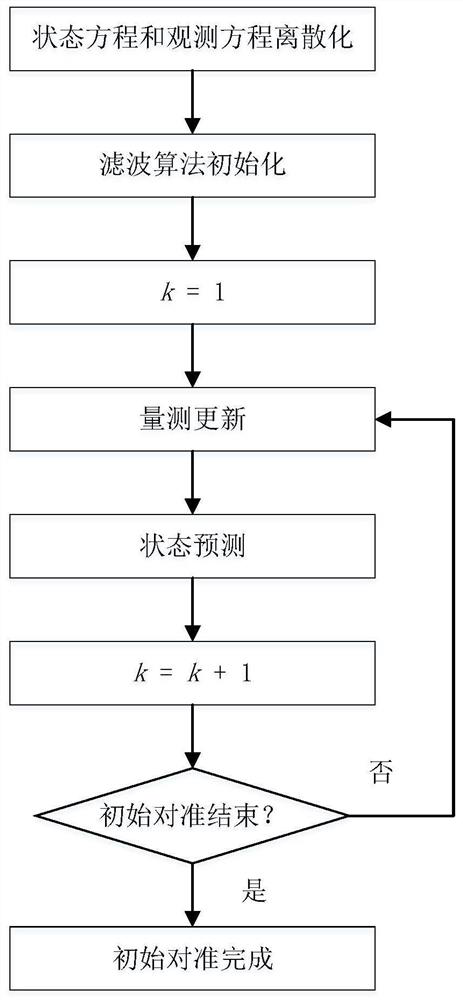
[0042] Such as figure 1 Shown, the present invention is concretely realized as follows:
[0043] (1) State equation modeling
[0044] Taking the earth fixed coordinate system e system as the navigation coordinate system, define is the rotation quaternion from the carrier coordinate system b to the e system (each element is denoted as q 0 ,q 1 ,q 2 ,q 3 ), To calculate the quaternion (each element is denoted as q 0 ,q 1 ,q 2 ,q 3 ), "x" represents the calculated value or real value (including calculation error or measurement error) of any variable x, and "δx" represents the error of any variable x. Define Additive Quaternion Error (Additive Quaternion Error, AQE) as the difference between the calculated quaternion and the real quaternion, recorded as:
[0045]
[0046] Attitude error equation:
[0047]
[0048] in: is the projectio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More