

Method for identifying semantic information of indoor scene point cloud component
A technology of semantic information and indoor scenes, which is applied in the fields of surveying and mapping and intelligent robots, can solve problems such as high requirements for computers and data sets, reduced recognition accuracy, and large amount of calculations, and achieve high clustering efficiency, improved computing efficiency, and low computer requirements Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0044] The present invention will be described in detail below with reference to the drawings and specific embodiments. This embodiment is implemented on the premise of the technical solution of the present invention, and a detailed implementation mode and specific operation process are given, but the protection scope of the present invention is not limited to the following embodiments.
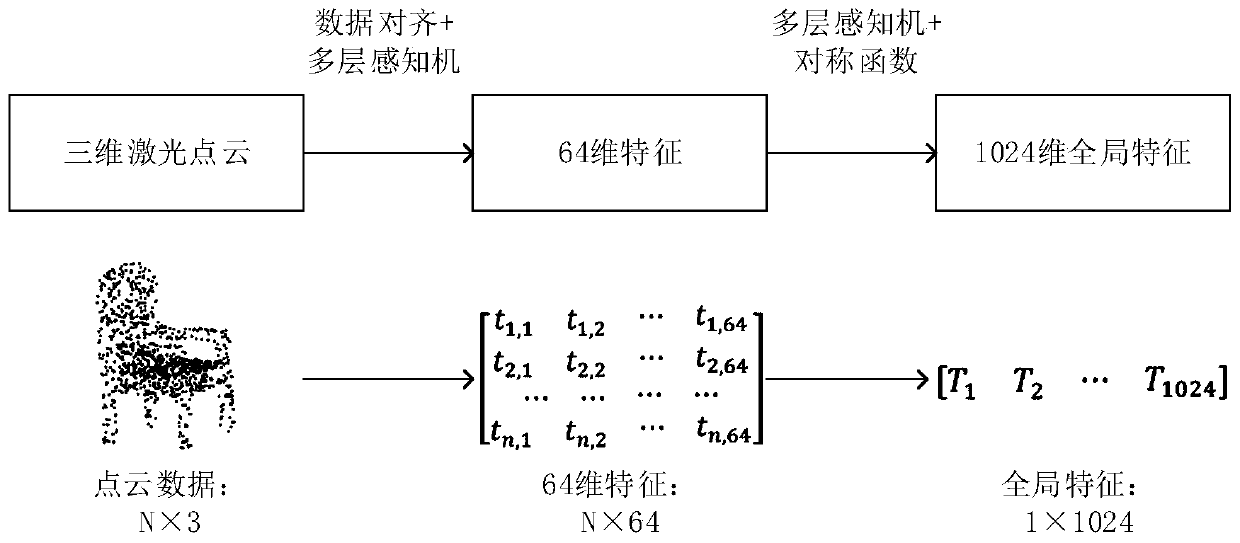
[0045] Such as figure 1 As shown, this embodiment provides a method for recognizing semantic information of point cloud components in an indoor scene. The data used are all component point clouds of indoor scenes, and a small amount of point cloud data of indoor scene objects of known categories are used as samples to perform semantic assignment for a large number of object point cloud data of unknown categories. The main steps are as follows:
[0046] Step S1: Put a small amount of point cloud data of known categories in the acquired large batch of 3D laser point cloud data of unknown semantic ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More