

Remote operated vehicle rapid obstacle avoidance system and method thereof
An underwater robot and obstacle avoidance technology, applied in the field of robots, can solve problems such as inflexible adjustment, inability to ensure driving safety, inconvenient adjustment, etc., and achieve good adjustment effect, flexible and convenient movement and adjustment, and rapid obstacle avoidance function
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
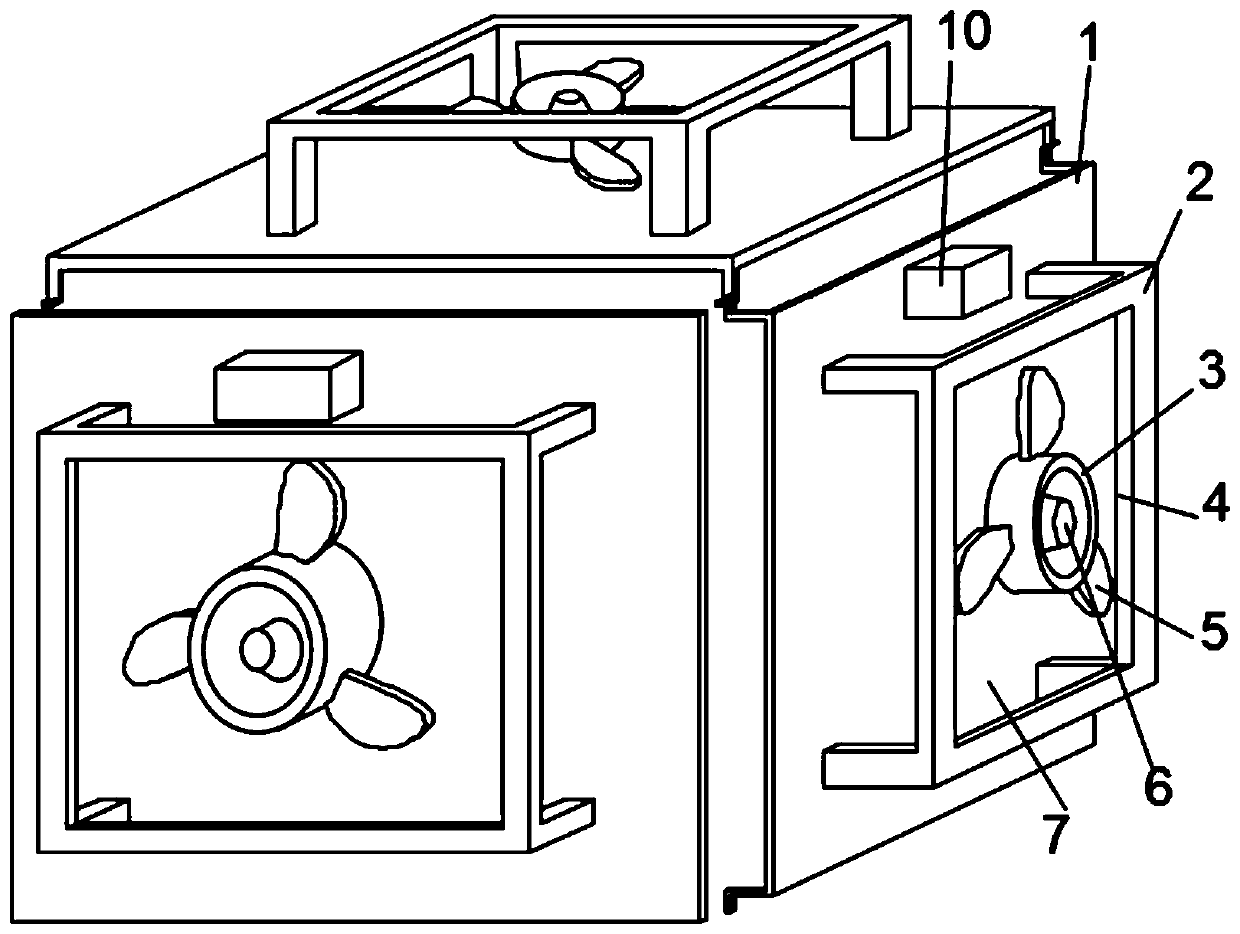
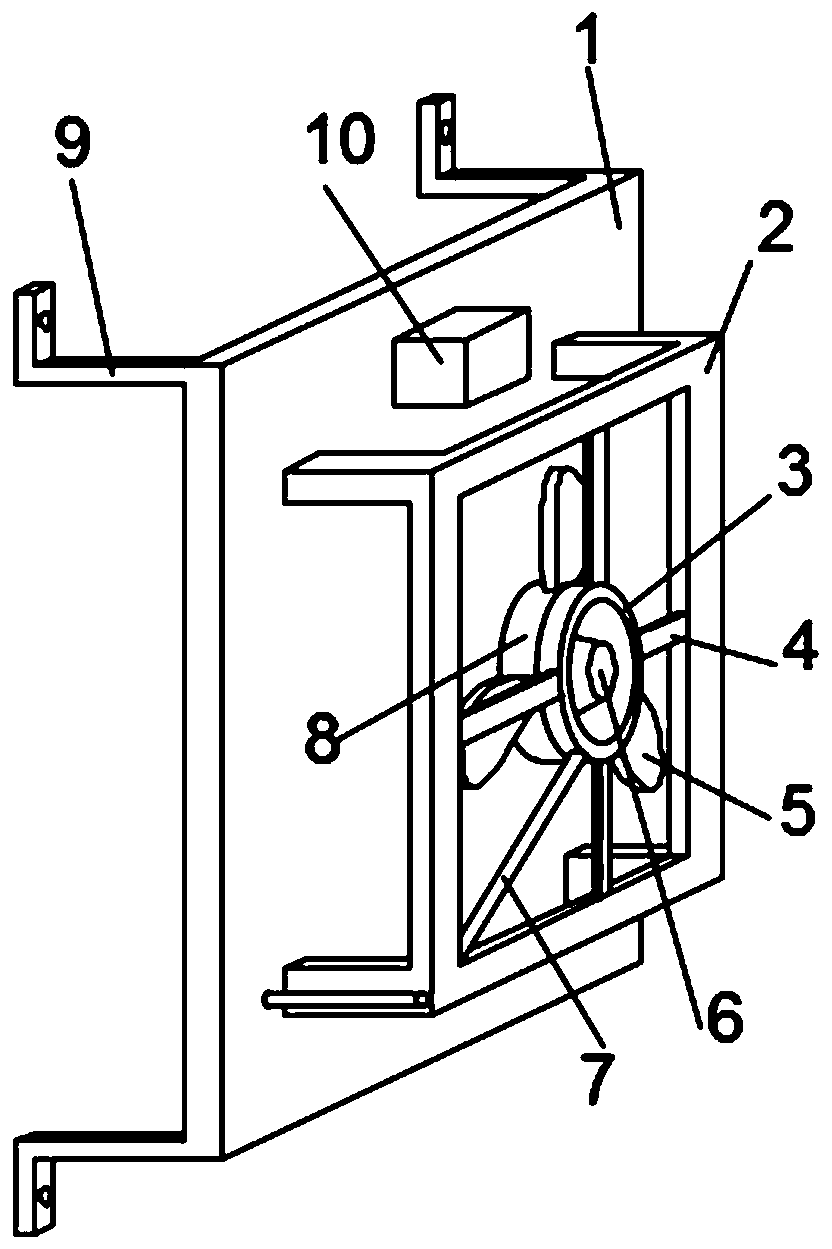
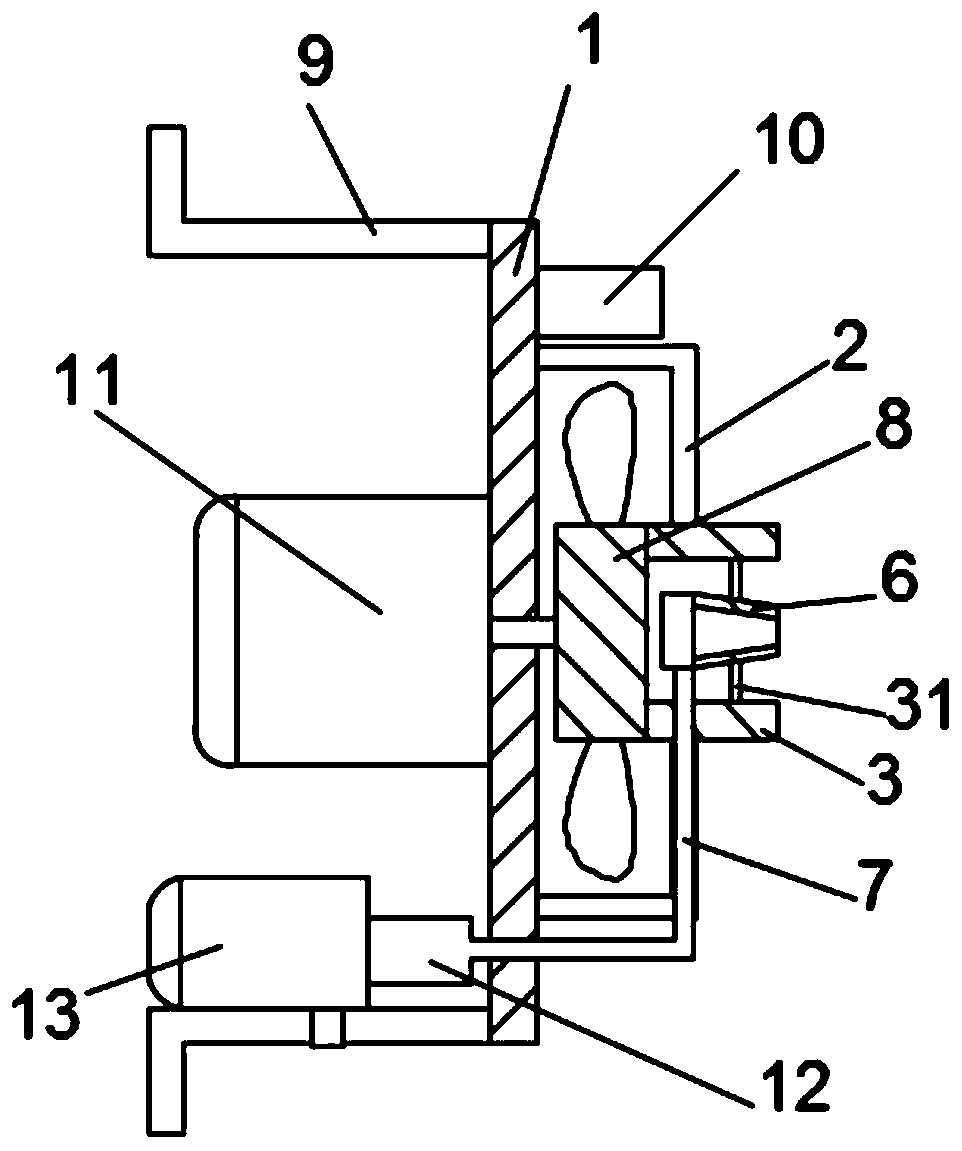
[0028] see Figure 1-5 , the present embodiment provides a rapid obstacle avoidance system for an underwater robot, comprising a mounting plate 1, mounting brackets 9 are fixedly mounted on the four corners of the upper end of the mounting plate 1, and a motor 11 is fixedly mounted on the inner side of the mounting plate 1, so The other side of the installation plate 1 is rotatably installed with a shaft 8, the shaft 8 is fixedly connected to the output shaft of the motor 11, the impeller 5 is fixedly installed on the outside of the shaft 8, and the sonar 10 is fixedly installed on the outside of the installation plate 1. , the sonar 10 is connected with a chip through a cable, a support frame 2 is fixedly installed on the outside of the mounting plate 1, and a protective strip 4 is installed in the middle of the outer support of the support frame 2, and the protective strip 4 can play a role in the impeller 5. The role of protection is to prevent stones or obstacles in the wa...
Embodiment 2
[0037] see figure 2 , a further improvement is made on the basis of Embodiment 1: the pipe 7 runs through the side wall of the mounting plate 1 and the support frame 2, and runs through the side wall of the sleeve 3 to connect with the high-pressure nozzle 6, and the pipe 7 runs through the support frame 2, The support frame 2 can fix the pipeline 7, prevent the pipeline 7 from shaking, and at the same time make the pipeline 7 be located inside the support frame 2 to protect the pipeline 7. The mounting bracket 9 is an L-shaped structure. And the mounting bracket 9 is provided with a mounting hole to facilitate the installation of the mounting plate 1 .
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More