

System for grabbing part from material frame under visual guidance of robot and control method
A technology of robot vision and control method, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve the problems of repeated operations on parts, too high requirements for material frames, and difficult operations, so as to improve accuracy and stability. performance, reduce position deviation, and reduce equipment cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
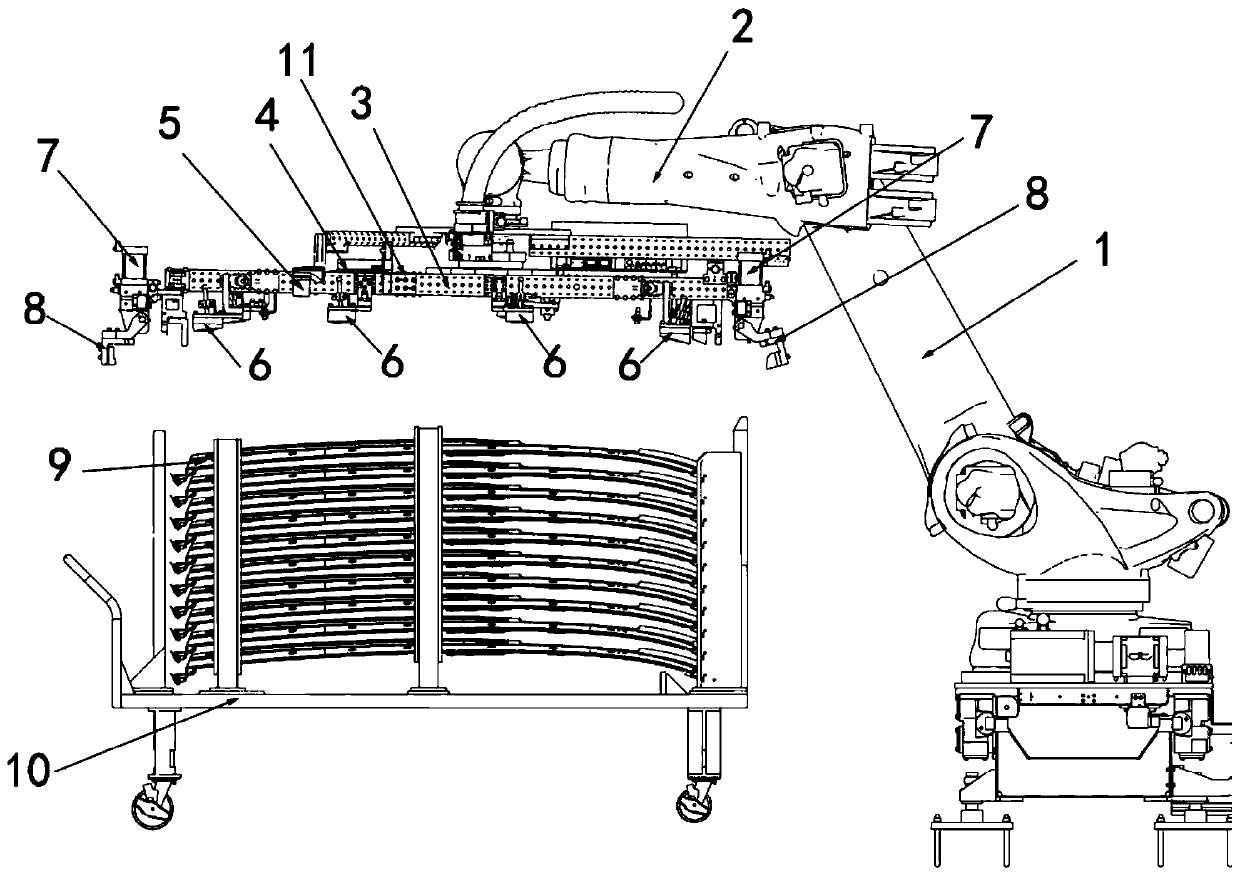
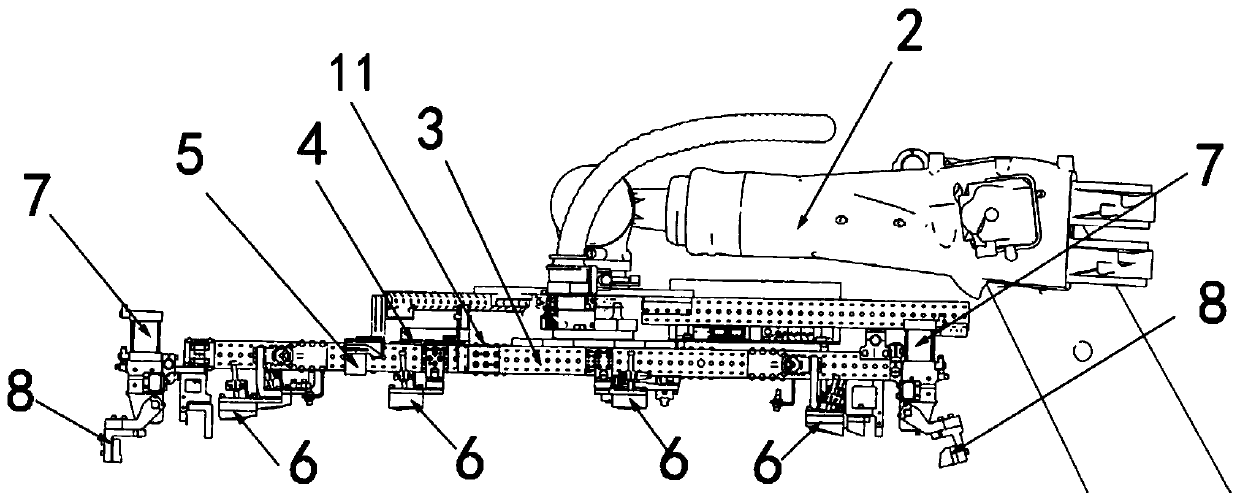
[0047] A system for grabbing parts from a material frame guided by robot vision, the system is used to grab parts 9 from a material frame 10, such as figure 1 As shown, the part 9 is a plurality of parts 9 with the same shape, which are stacked layer by layer in the material frame 10. The system includes a robot 1, a processor and a gripper assembly. The gripper assembly includes a main beam 3 and a part position sensing module. And the clamping module, the robot 1 is used to drive the gripper assembly to move, the part position sensing module is used to obtain the position information of the part 9 and the material frame 10, the clamping module is used to grab the part 9, and the processor is used to process the position information and according to The position information controls the moving action of the robot 1 and the grasping action of the clamping module, and the robot 1, the part position sensing module and the clamping module are respectively connected to the processo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More