

A semi-passive walking robot driven by imitation aerodynamics and its control method
A walking robot, semi-passive technology, applied in the field of robotics, can solve the problems of insufficient exploration of the telescopic leg mechanism, complex structure, etc., and achieve the effect of fast walking speed, short response time, and large pulse thrust
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The technical solutions of the present invention will be further described below with reference to the accompanying drawings, but the protection scope of the present invention is not limited thereto.
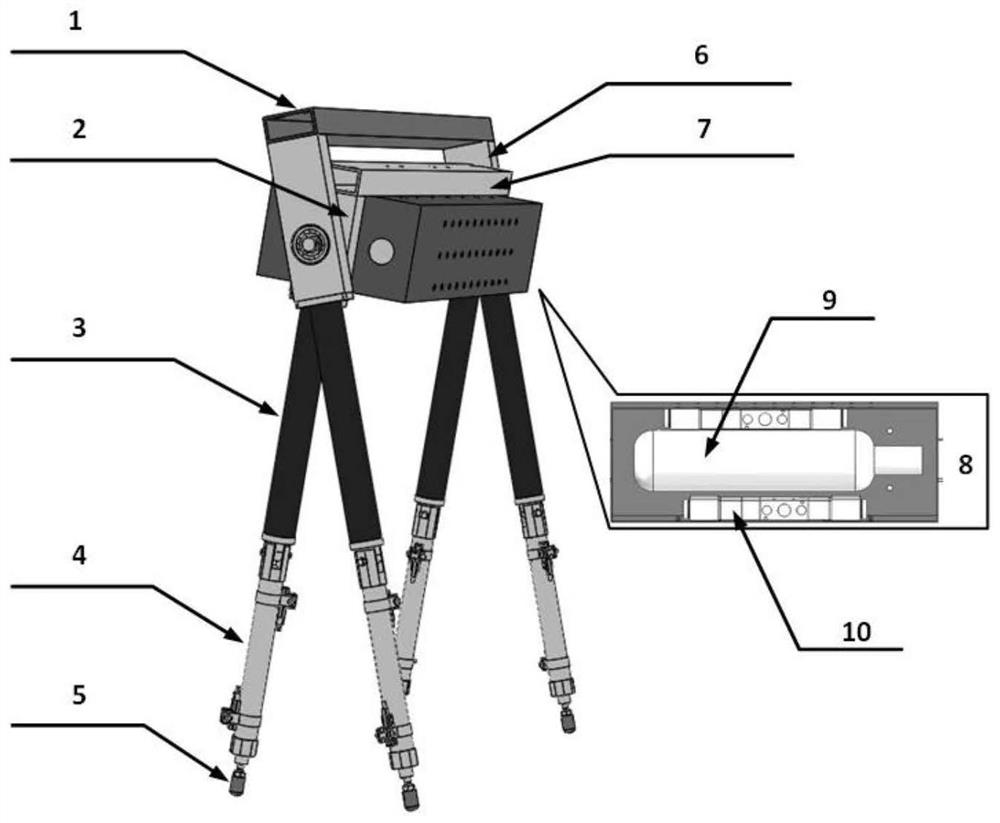
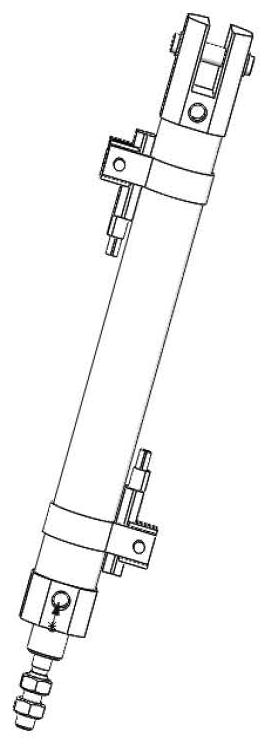
[0029] like figure 1 As shown, a bionic pneumatically driven semi-passive walking robot includes: inner leg upper plate 7, outer leg upper plate 1, two inner leg support plates 2, two outer leg support plates 6, four carbon tubes 3, Four linear push rods 4 and a control box 8, the control box 8 is used to store the high-pressure gas cylinder 9 and the solenoid valve 10.
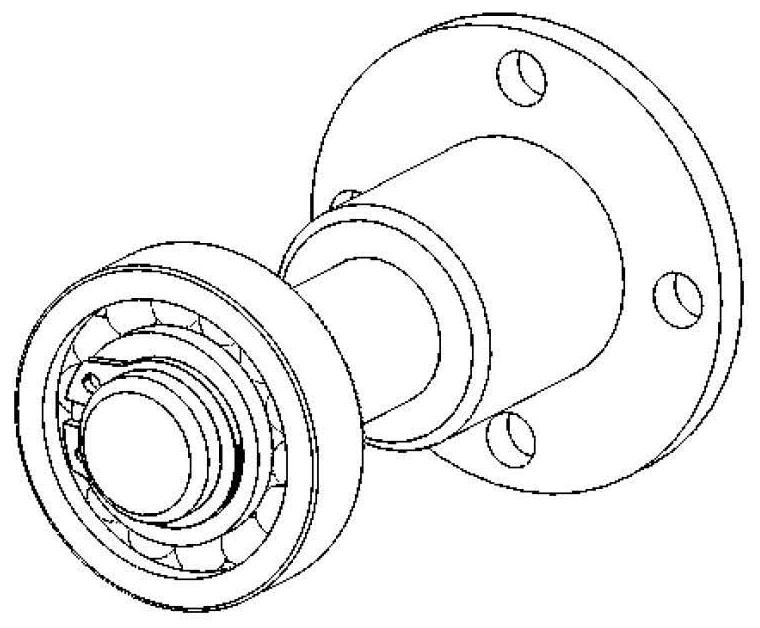
[0030] The outer leg upper plate 1 is made of hollow aluminum profiles. Both ends of the outer leg upper plate 1 are fixedly connected to the two outer leg support plates 6 through screw connections. The outer leg upper plate 1 ensures that the two outer legs of the robot have the same posture. The lower part of the outer leg support plate 6 is coaxially matched with the middle part of the inner leg sup...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More