

Real-time three-dimensional reconstruction method based on depth sensor
A depth sensor, real-time three-dimensional technology, applied in the direction of instrumentation, 3D modeling, image data processing, etc., can solve problems such as large noise, unsatisfactory reconstruction effect, unstable 3D point cloud, etc., to improve fitting accuracy and improve Operating efficiency and accuracy, the effect of reduced time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0037] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments. This embodiment is carried out on the premise of the technical solution of the present invention, and detailed implementation and specific operation process are given, but the protection scope of the present invention is not limited to the following embodiments.
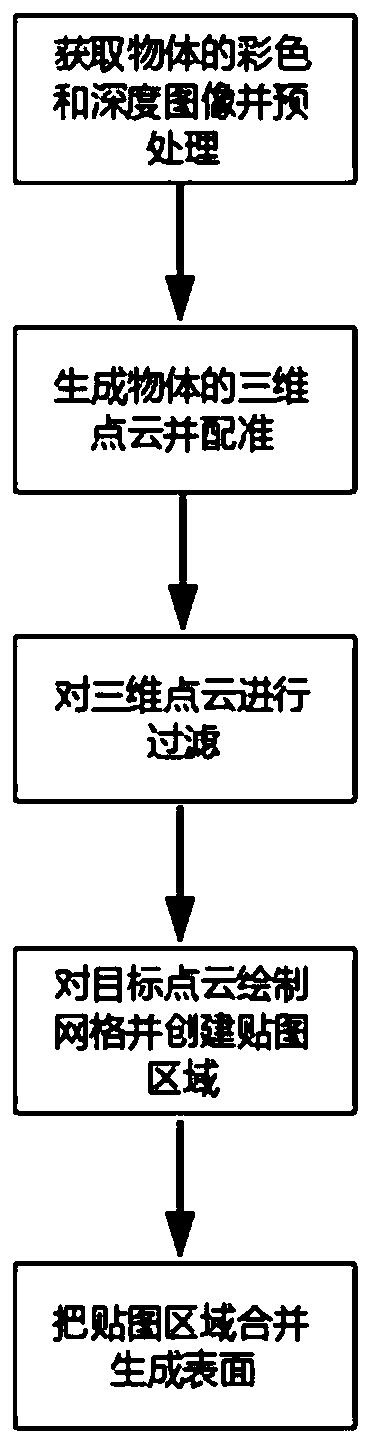
[0038] Such as figure 1 As shown, a real-time 3D reconstruction method based on a depth sensor includes the following steps:
[0039] Step S1: Obtain real-time color and depth images of the target object through the depth sensor and perform preprocessing;
[0040] Step S2: Generate and register the 3D origin point cloud of the target object according to the color and depth images;
[0041] Step S3: Filter the 3D origin point cloud to obtain the target point cloud of the target object;
[0042] Step S4: Draw a triangle mesh according to the target point cloud and create a map area; ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More