

Mixed firework particle swarm synergic method for solving unmanned aerial vehicle constraint route planning
A route planning, unmanned aerial vehicle technology, applied in the direction of navigation calculation tools, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
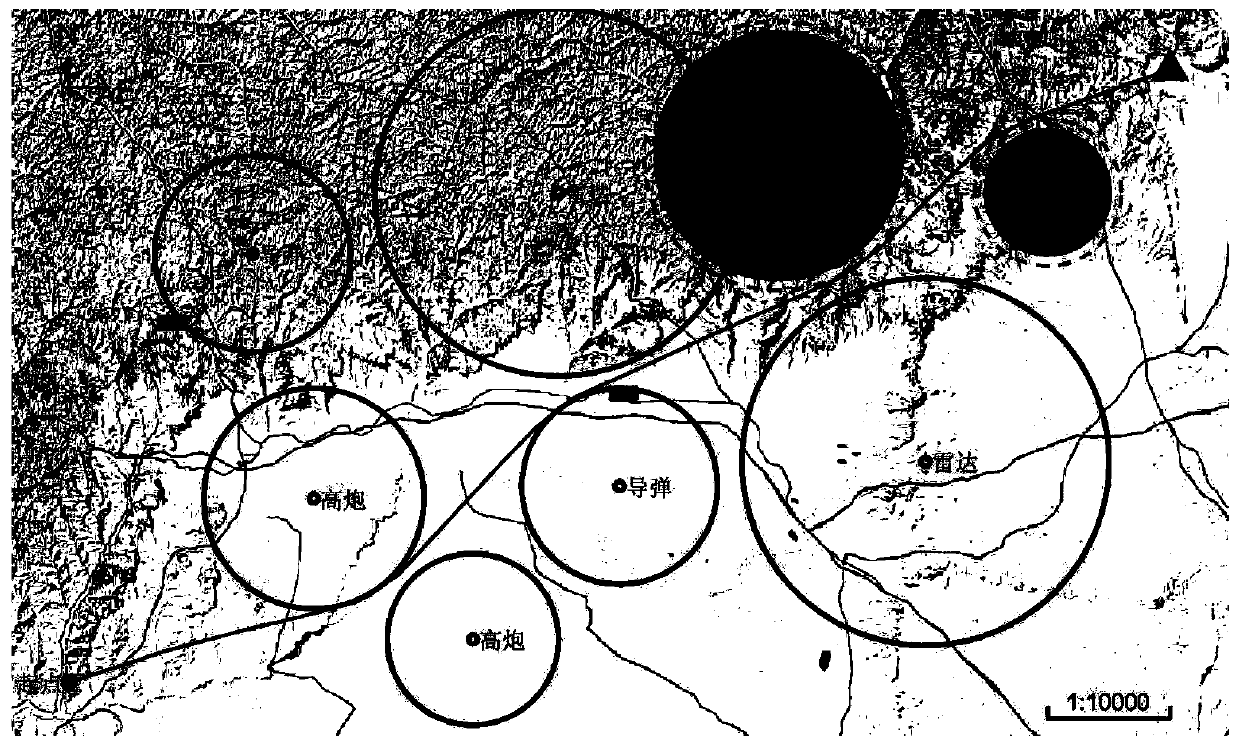
[0105] The present invention is further described below in conjunction with specific implementation process, with image 3 Take the environment as an example to illustrate:
[0106] Preparations: Set the flying speed of the UAV as v=1m / s. The parameter values are as follows: the maximum number of iterations NC max =500; safety distance Δd=20; growth rate parameter ξ=15; explosion spark particle constant M=30; proportional parameter β=0.8; fireworks minimum explosion radius A min =20; acceleration constant c 1 =0.8, c 2 =0.8; inertia weight ω=0.9. Let the coordinates of the starting point be S=[50,50], the coordinates of the target point be T=[950,550], and the dimension of fireworks and particles be D=25.
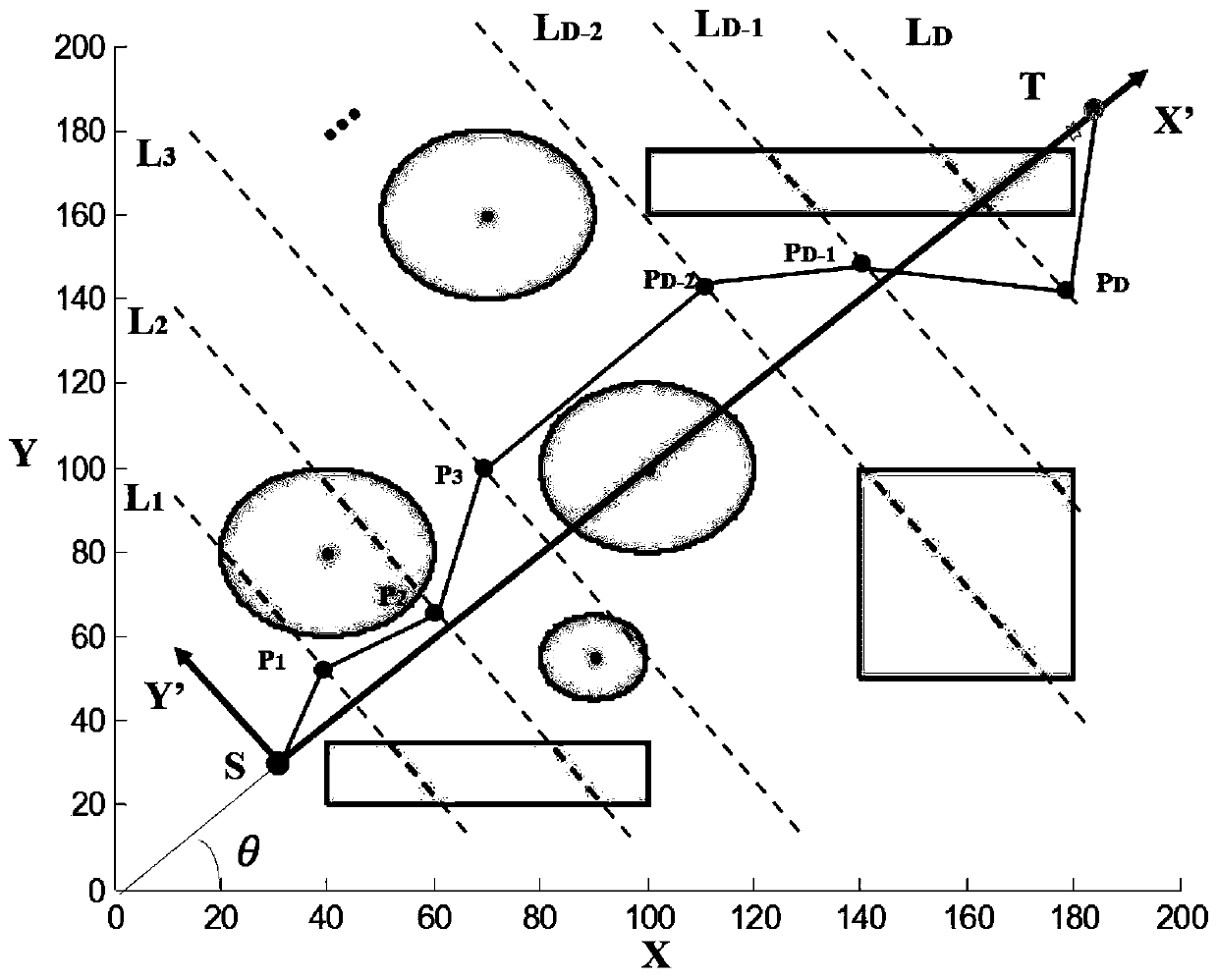
[0107] Step 1: Establish a rotating coordinate system X'-S-Y' with ST as the X' axis, and convert the position coordinates of the starting point, target point and obstacles into the rotating coordinate system. The coordinate conversion formula is as follows:
[0108...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More