

Action model based on deep learning and training method thereof
A technology of deep learning and training methods, applied in the field of deep learning neural network models, which can solve problems such as information loss and inability to guarantee accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
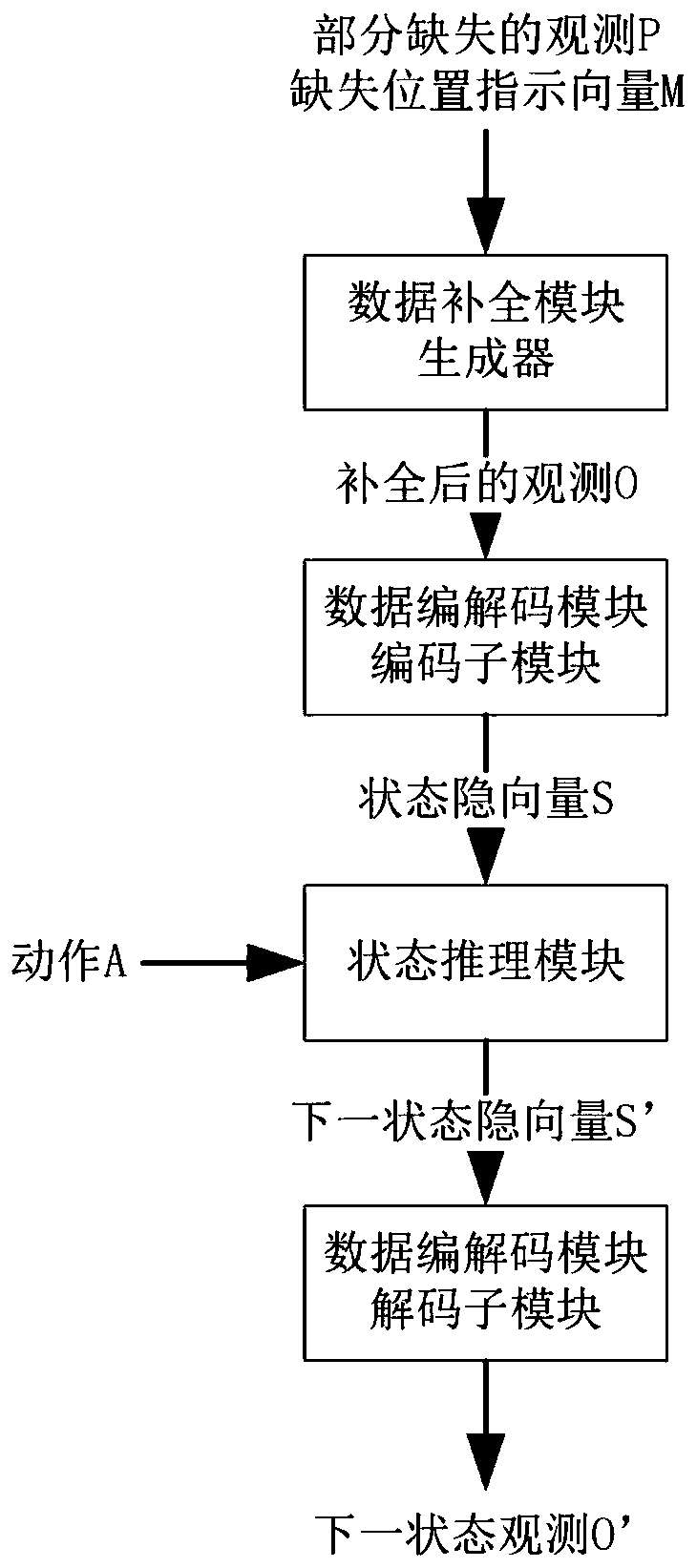
[0062] Such as figure 1 Shown is an embodiment of an action model based on deep learning, including a data completion module, a data encoding and decoding module, a state reasoning module and a search planning module;
[0063] The data completion module is used to predict the missing part of the original data P, and supplement it to the original data to generate complete and observable data O;
[0064] The data codec module is used to realize the two-way conversion of the data O in the original form and the data S of the propositional form in the implicit space; The digital codec module includes two submodules: an encoding module and a decoding module; the encoding module is used to convert The data O in the original form is encoded as a proposition S in the hidden space; the decoding module is used to decode the proposition S in the hidden space to obtain the data O in the original form; for the data encoding and decoding module, the present invention uses a variational autoe...
Embodiment 2
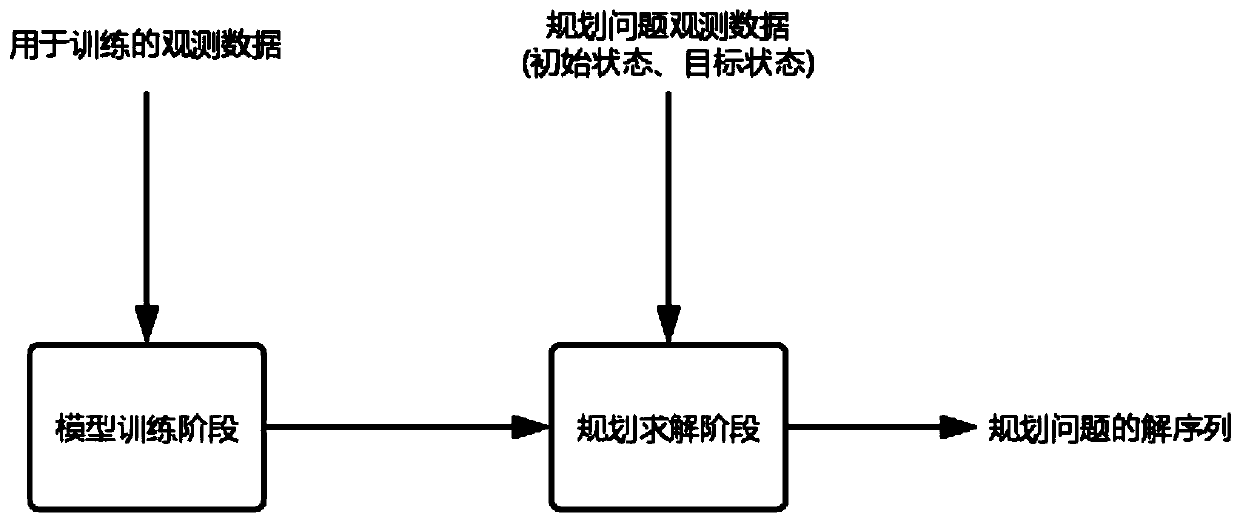
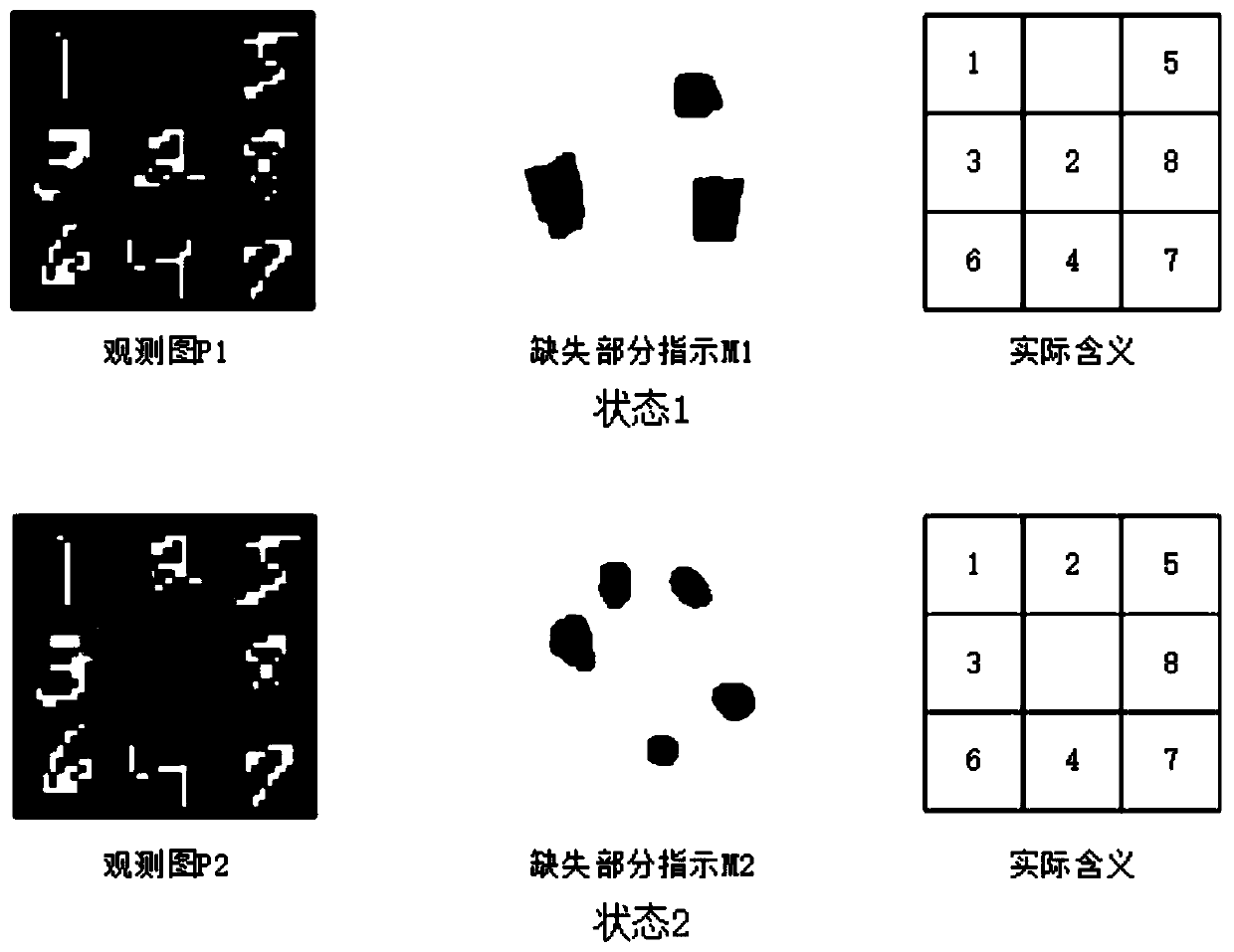
[0070] Such as Figure 2-3 Shown is a kind of embodiment of the training method of the action model based on deep learning, for training the action model based on deep learning of embodiment 1, wherein image 3 In order to have collected some observation data of the 8-digit problem, it is recorded as data set X, and the specific steps are as follows:
[0071] Step 1: Input the data set X into the data completion module, the sample form of the data set X is , P is a d-dimensional continuous vector; M is a d-dimensional discrete vector;
[0072] Step 2: The data completion module completes the data set X to obtain the data set X2, and uses the data set to train the codec module;
[0073] Step 3: The encoding sub-module of the data encoding and decoding module encodes the samples of the data set X2 to obtain the data set X3 and use the data set to train the state reasoning module.
[0074] Among them, the training of the data completion module includes the training of the gener...
Embodiment 3
[0113] Such as Figure 4 Shown are the initial observations and target observations of some eight-number problems to be solved, which are recorded as set Q. Input the set Q into the action model that has been trained in Embodiment 2, solve the problems in the set Q, and for each problem, given as Figure 4 The observation picture P of the initial state shown 0 and the position indicator variable M of the missing part 0 , and the observed picture P of the target state g and the position indicator variable M of the missing part g ,Such as Figure 5 As shown, the specific steps in the planning stage are as follows:
[0114] Step 1, the observation picture P of the initial state 0 and the position indicator variable M of the missing part 0 , and the observed picture P of the target state g and the position indicator variable M of the missing part g , respectively input into the generator G of the data completion module to obtain the completed initial state observation pic...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More