Structured scene vision SLAM method based on improved dot-line features
A structured and line-featured technology, applied in the field of structured scene visual SLAM, can solve the problems of low efficiency and low precision of simultaneous positioning and mapping of robots
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0097] Below in conjunction with embodiment and accompanying drawing, the technical scheme of the present invention will be described in further detail; It should be understood that this embodiment is only used to illustrate the present invention and is not intended to limit the scope of the present invention. Modifications in various equivalent forms all fall within the scope defined by the appended claims of this application.
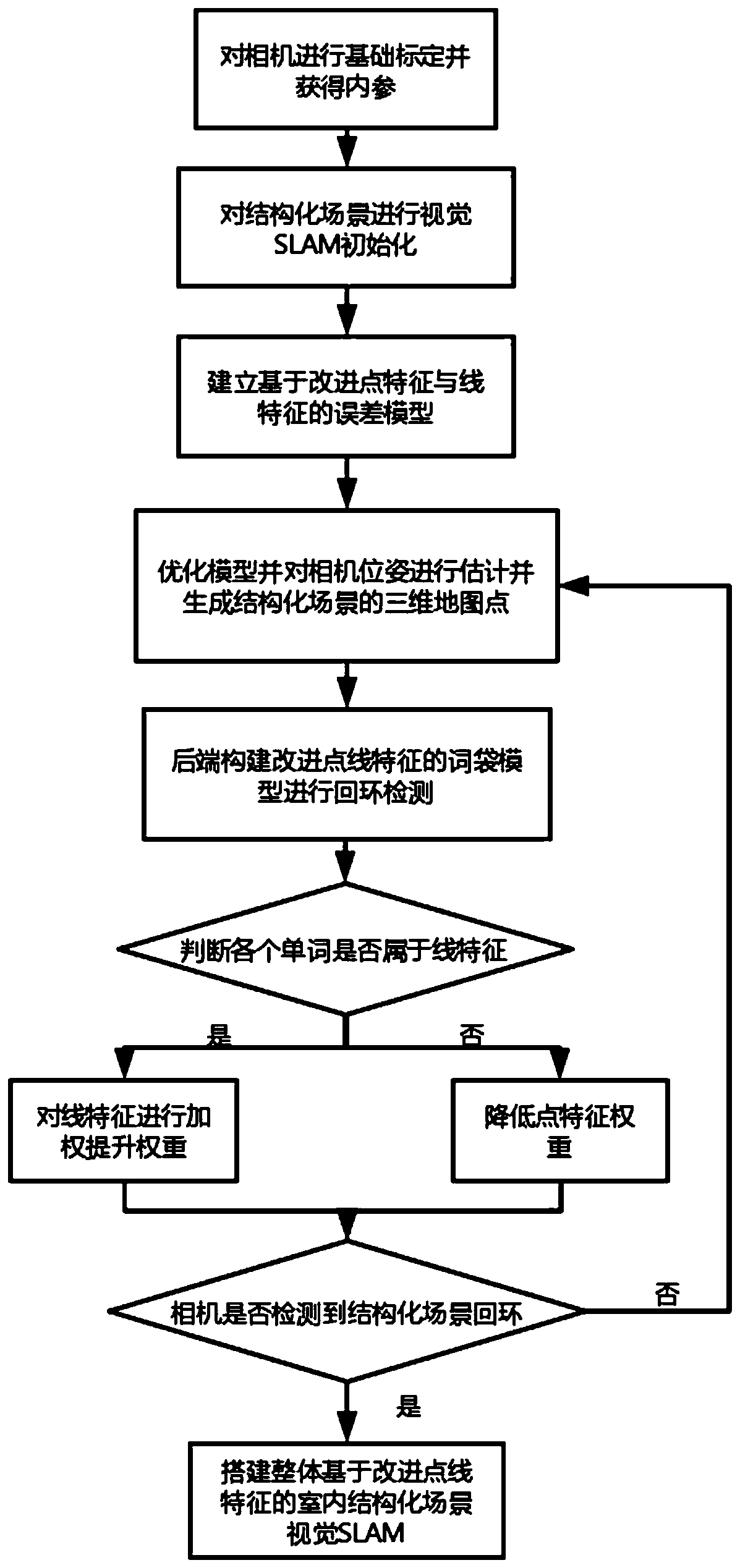
[0098] S1. Perform basic calibration on the RGB-D depth camera to obtain internal reference information; perform visual synchronous positioning and mapping (visual SLAM) initialization on the structured scene through the depth camera;
[0099] S2. Extract the ORB point features and LSD line features in the structured scene from the video frame obtained by the camera, and correspond to the space points and the space lines in the structured scene respectively;
[0100] S3. According to the spatial point and spatial line corresponding to the ORB point fe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More