Self-moving robot
A robot and self-moving technology, which is applied in the direction of manipulators, manufacturing tools, etc., can solve the problems of easily forming obstacles and reducing the obstacle avoidance function of self-moving robots, so as to achieve the effect of improving service life, good dust-proof effect, and preventing dust from entering
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach 1
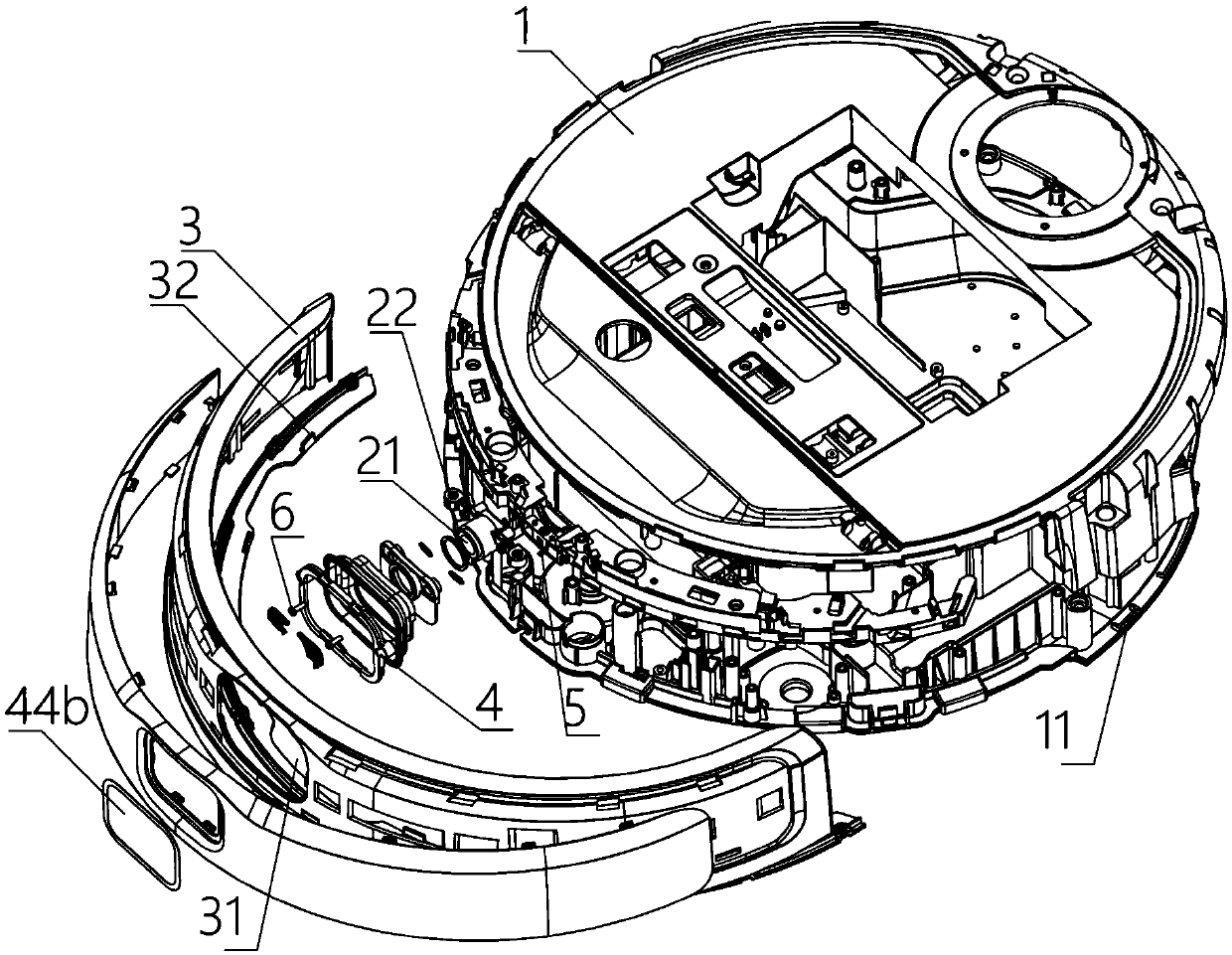
[0066] The inventors of the present application found that in the prior art, self-moving robots for intelligent cleaning usually include: a main body, an optical sensing device installed on the main body, and a strike plate connected to the main body. The sensing device is used to obtain the information of the surrounding obstacles to build a map and avoid obstacles.
[0067] In order to make the visual field of the optical sensing device clear and to observe the scene of the target route of the self-mobile robot, usually, a light-transmitting part is arranged on the collision plate, and a lens is arranged on the light-transmitting part. However, this arrangement creates a gap between the impact plate and the main body, causing dust to enter, thereby polluting the optical sensing device and reducing the service life of the optical sensing device.
[0068] However, in order to prevent the optical sensing device from being exposed to the dusty environment, generally, the front e...
Embodiment approach 2
[0090] The inventors of the present application have found that, in order to ensure the obstacle avoidance effect, the self-mobile robot is further provided with some other optical sensing devices.
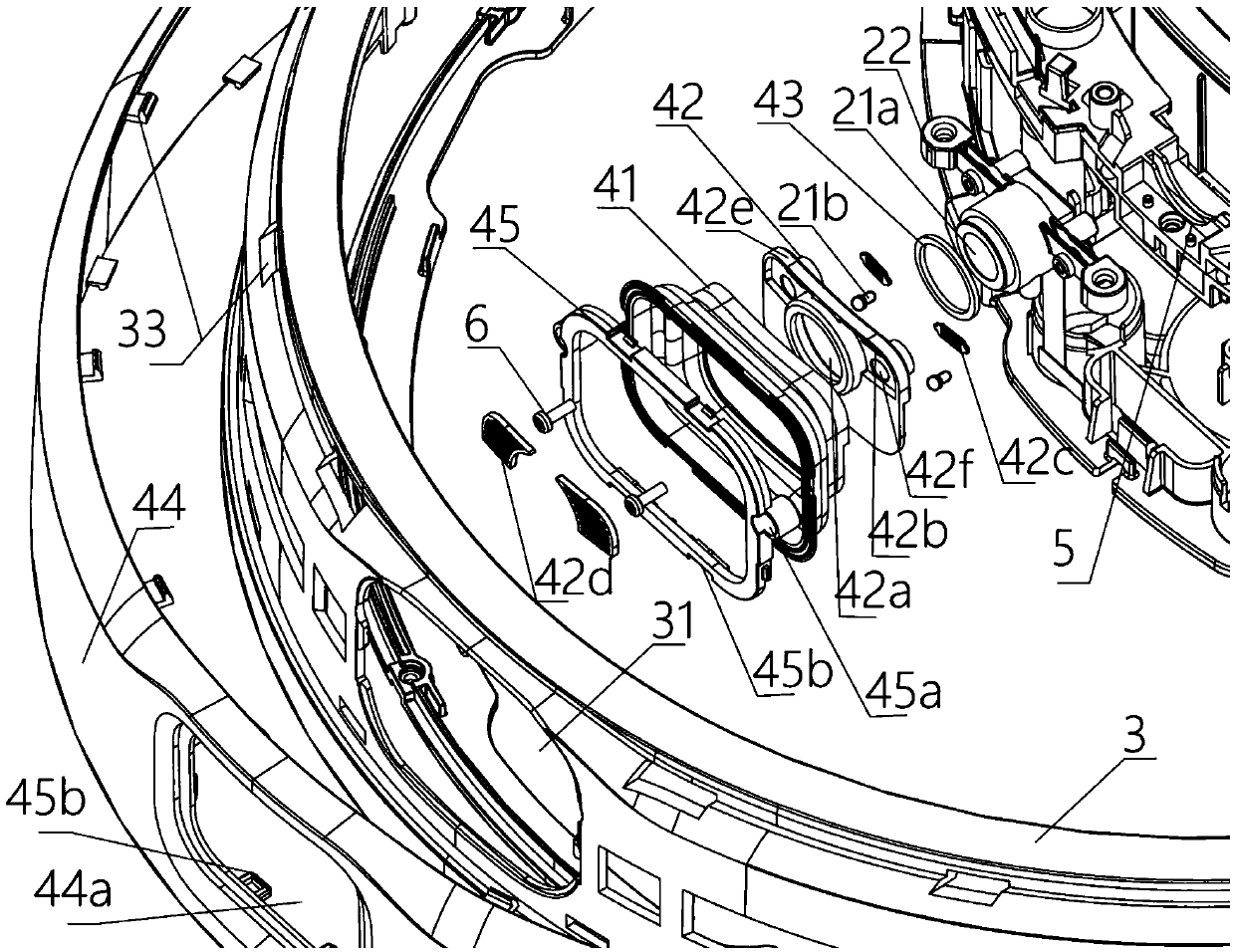
[0091] In view of this, the second embodiment of the present application provides a self-moving robot. The second embodiment is a further improvement based on the first embodiment. The main improvement is that, see figure 2 As shown, in the second embodiment of the present application, the optical sensing device 21 includes an infrared sensing component 21b; the rear buffer see-through window 42 is at least partly transparent, and the infrared sensing component 21b faces the transparent portion of the rear buffer see-through window 42 light part. The infrared sensing component 21b can detect obstacles in the path of the self-mobile robot through the light-transmitting part of the rear buffer see-through window 42, so that the route can be planned in advance and the probability of...
Embodiment approach 3
[0098] In order to ensure the dustproof effect, the sealed space formed by the sealing structure 4 is completely sealed, so when the self-mobile robot is hit, the air pressure inside and outside the sealed space will be different.
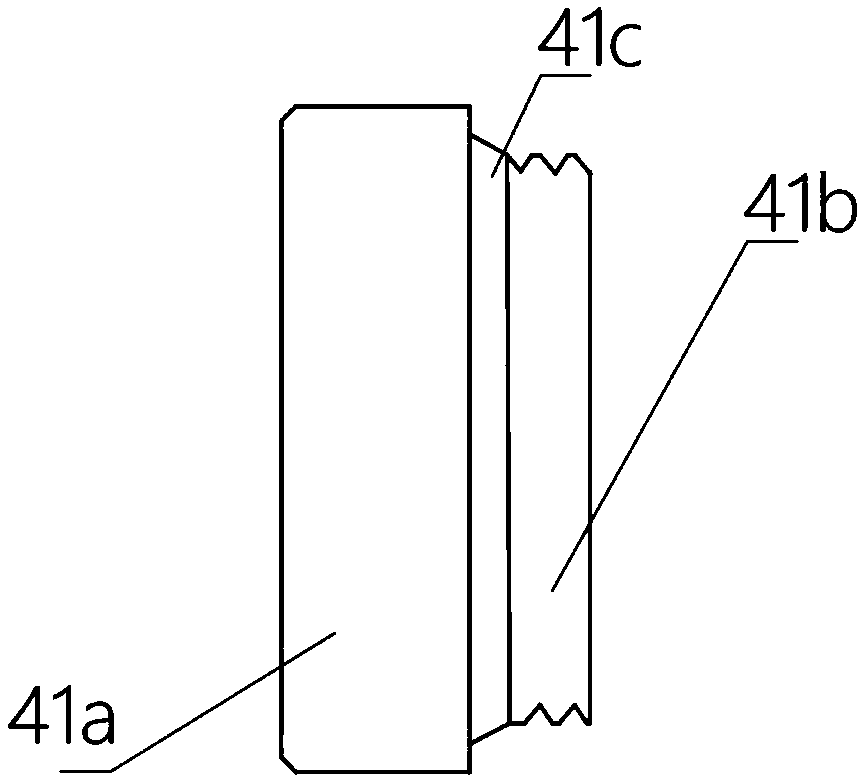
[0099] At the moment of impact, the flexible seal 41 is squeezed, and the gas pressure in the sealed space increases. When the impact disappears and the impact plate 3 drives the flexible seal 41 to recover, it will stretch the sealed space together, so that the air in the sealed space The air pressure becomes thinner and the pressure decreases. These pressure changes will slightly hinder the movement range of the striker 3, which is not conducive to the cushioning effect of the striker 3, and also increases the strength requirements for the flexible seal 41.
[0100] In view of this, the third embodiment of the present application provides a self-mobile robot. The third embodiment is a further improvement based on the first embodiment or the second...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com