

Linear structure light fitting plane-based robot repeated positioning accuracy measurement method
A technology of repetitive positioning accuracy and linear structured light, applied in the field of computer vision, can solve problems such as noise pollution, and achieve the effects of non-contact measurement, good anti-interference performance, and fast measurement speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
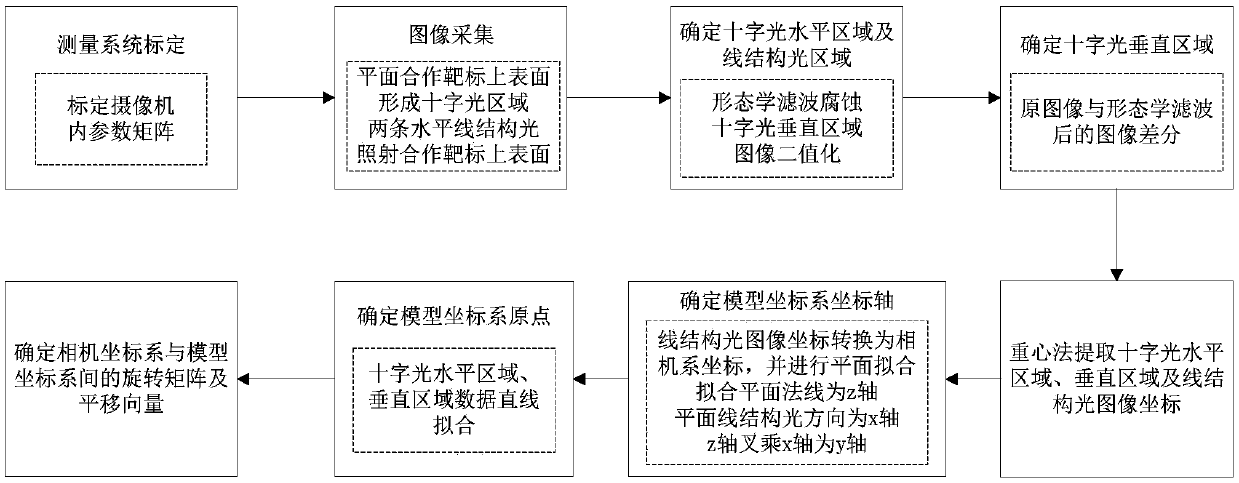
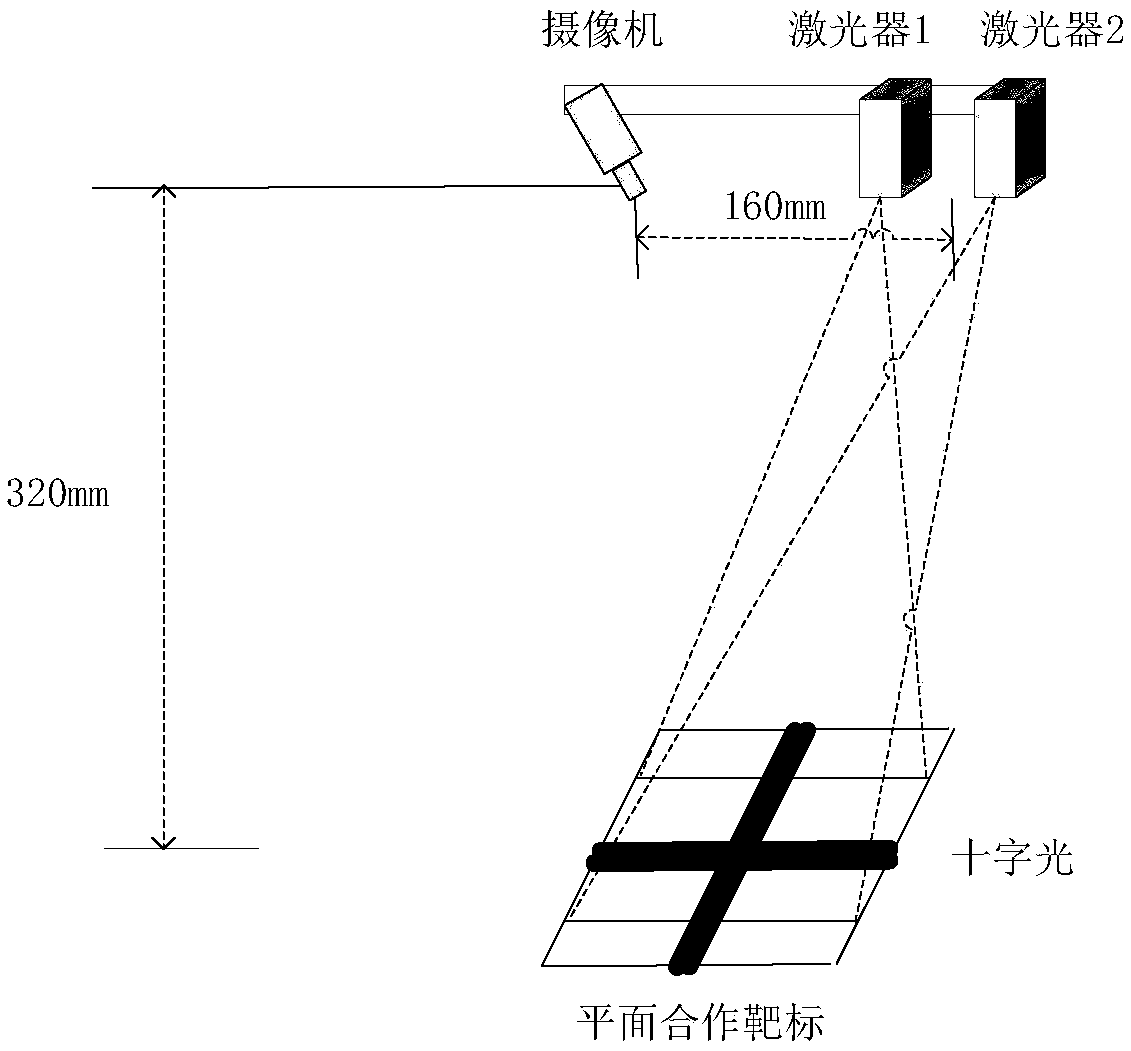
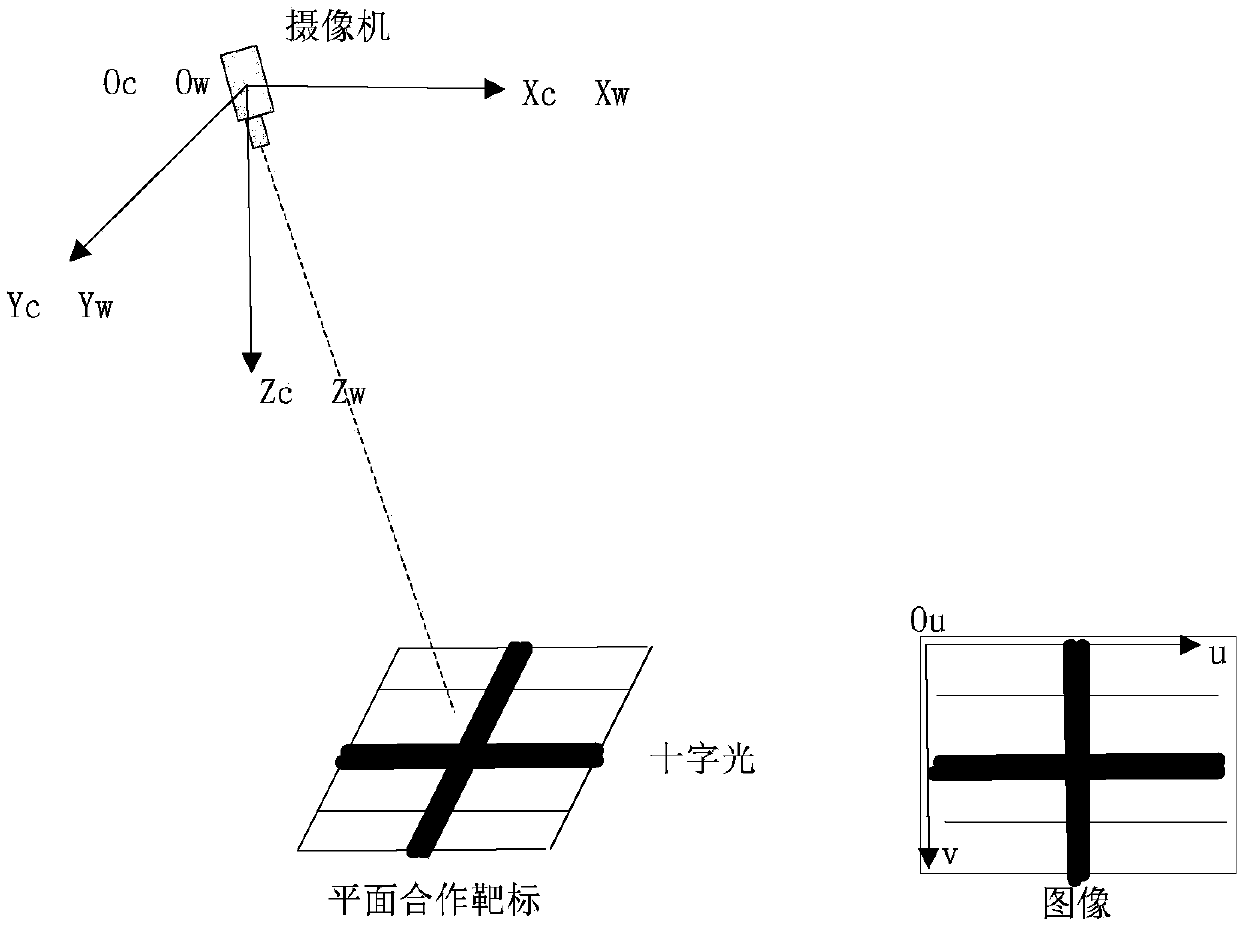
[0050] Such as Figure 4 As shown, the robot repetitive positioning accuracy measurement method based on the line structured light fitting plane of the present invention uses the planar cooperative target and the line structured light to fit the cooperative target plane equation, and then determines the coordinate axis and origin of the model coordinate system, and finally obtains the camera The rotation matrix and translation vector between the coordinate system and the model coordinate system. Specifically, two horizontal lines of structured light are used to irradiate the upper surface of the planar cooperation target, and its image coordinates are extracted; according to the geometric relationship between the camera coordinate system and the image coordinate system, the line structured light image coordinates are converted into camera syst...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More