

Formation and obstacle avoidance control method of UAVs in UAV system
A control method and unmanned aerial vehicle technology, applied in the direction of control/adjustment system, non-electric variable control, three-dimensional position/channel control, etc., can solve problems such as inability to reorganize, poor obstacle avoidance, etc., to save energy and improve handling of emergencies The ability of events and the effect of improving the completion rate of tasks
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The specific embodiments of the present invention are described below so that those skilled in the art can understand the present invention, but it should be clear that the present invention is not limited to the scope of the specific embodiments. For those of ordinary skill in the art, as long as various changes Within the spirit and scope of the present invention defined and determined by the appended claims, these changes are obvious, and all inventions and creations using the concept of the present invention are included in the protection list.
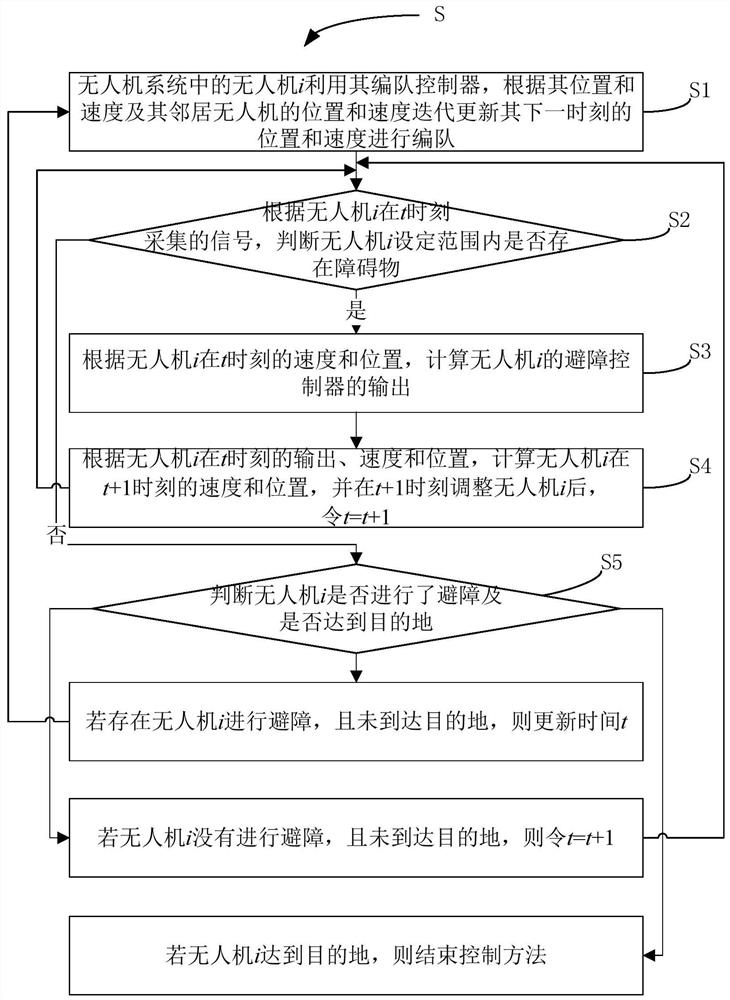
[0025] All UAVs used in formation in this scheme form a network topology map, and each UAV has a formation controller and an obstacle avoidance controller. Specifically, the formation controller and obstacle avoidance controller can be the UAV’s A model in the controller, the formation information of each UAV i is designed as f i =[f ix ,f iv ] T , where f ix , f iv Represents the set formation position and formation s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More