

Waist assisting exoskeleton robot
An exoskeleton robot, waist technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as increasing control complexity and increasing costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0062] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
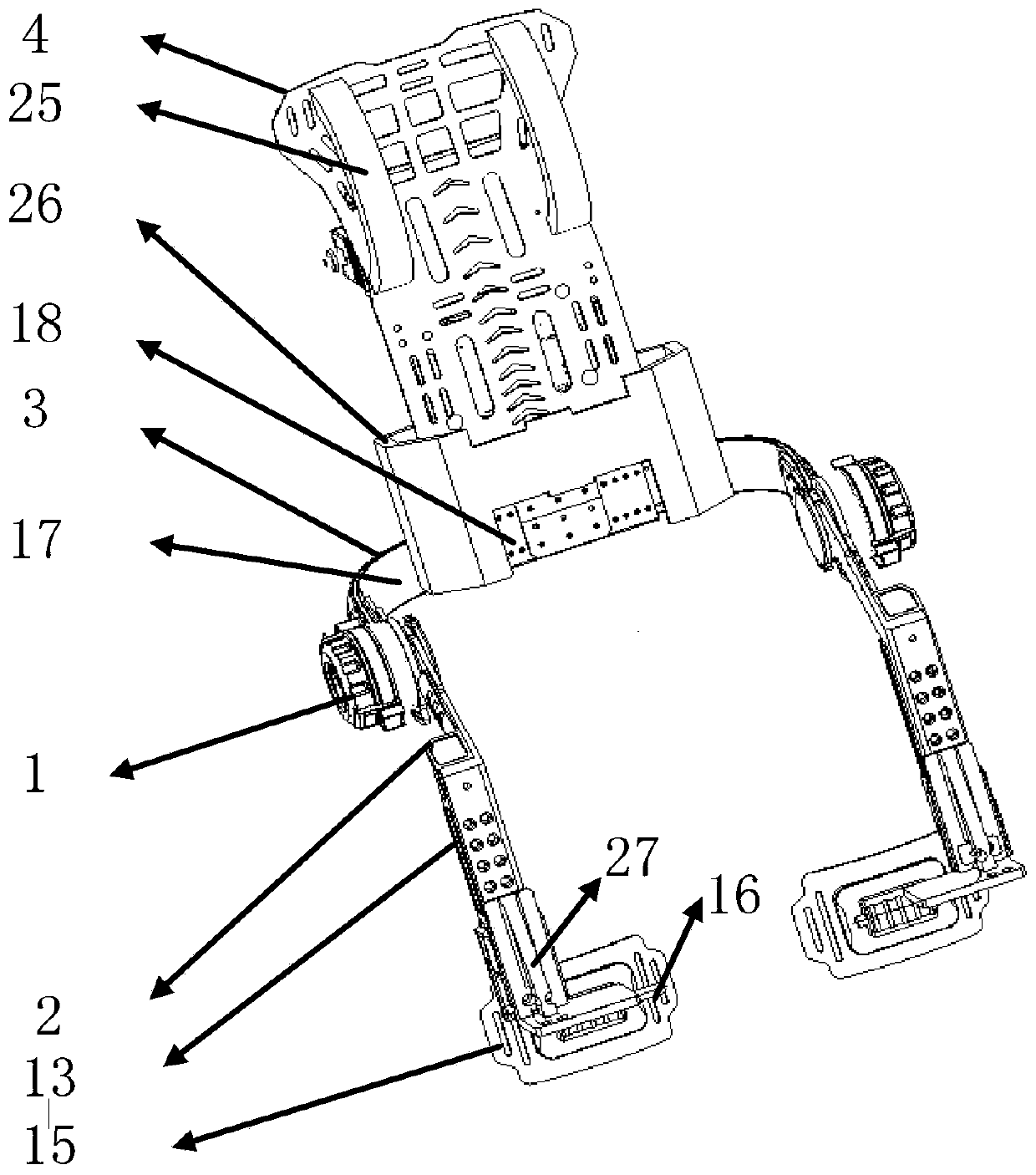
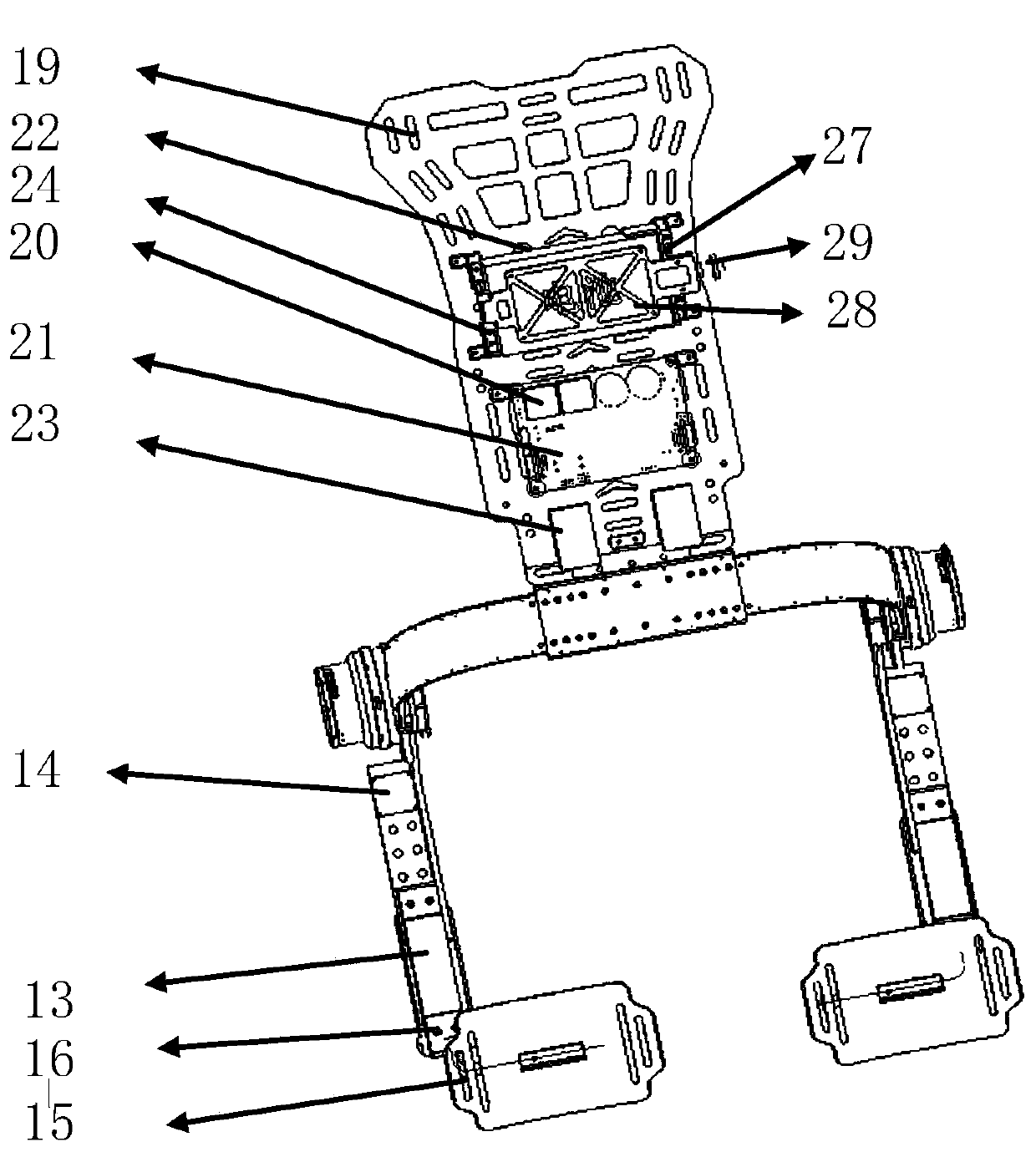
[0063] The invention relates to a waist-assisted exoskeleton robot. The back binding structure (25) wears the back connection assembly (4) on the back of the human body; the waist binding structure (26) wears the waist connection assembly (3) on the waist of the human body; After the exoskeleton robot is finished, the back connecting component (4) is always attached to the back of the human body, and the waist connecting component (3) is always attached to the waist of the human body; in the process of bending over to lift objects, the thigh component (2) is kept in contact with the human thigh. Fitting, the thigh component (2) and the back connection component (4) can detect changes in the posture of the human leg and back, and feed back to the waist joint component (1), and the waist joint component (1) drives the waist connection co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More